Maticová metoda Řešení SLAU aplikovaný na řešení soustav rovnic, ve kterých počet rovnic odpovídá počtu neznámých. Metoda se nejlépe používá pro řešení systémů nízkého řádu. Maticová metoda pro řešení soustav lineárních rovnic je založena na aplikaci vlastností násobení matic.
Jinými slovy tato metoda metoda inverzní matice, tzv. proto, že se řešení redukuje na obyčejnou maticovou rovnici, k jejímuž řešení potřebujete najít inverzní matici.
Metoda maticového řešení SLAE s determinantem, který je větší nebo menší než nula, je následující:
Předpokládejme, že existuje SLE (systém lineárních rovnic). n neznámý (přes libovolné pole):
To znamená, že jej lze snadno převést do maticové formy:
AX=B, Kde A— hlavní matice systému, B A X— sloupce volných termínů a řešení systému, v tomto pořadí:

Vynásobme tuto maticovou rovnici zleva A-1— inverzní matice k matici A: A −1 (AX)=A −1 B.
Protože A −1 A=E, znamená, X=A −1 B. Pravá část rovnice dává sloupec řešení počáteční systém. Podmínkou použitelnosti maticové metody je nedegenerace matice A. Nutné a dostatečný stav to znamená, že determinant matice se nerovná nule A:
detA≠0.
Pro homogenní soustava lineárních rovnic, tj. pokud vektor B=0, platí opačné pravidlo: systém AX=0 existuje netriviální (tj. nerovná se nule) řešení pouze tehdy, když detA=0. Toto spojení mezi řešeními homogenních a nehomogenních soustav lineárních rovnic se nazývá Fredholmská alternativa.
Tedy řešení SLAE maticová metoda vyrobené podle vzorce ![]() . Nebo se řešení SLAE najde pomocí inverzní matice A-1.
. Nebo se řešení SLAE najde pomocí inverzní matice A-1.
Je známo, že pro čtvercovou matici A objednat n na n Tady je inverzní matice A-1 pouze pokud je jeho determinant nenulový. Tedy systém n lineární algebraické rovnice S n Neznámé řešíme maticovou metodou pouze v případě, že determinant hlavní matice systému není roven nule.
Navzdory skutečnosti, že existují omezení možnosti použití této metody a existují potíže s výpočtem pro velké hodnoty koeficientů a systémů vysoký řád, metodu lze snadno implementovat na počítači.
Příklad řešení nehomogenního SLAE.

Nejprve zkontrolujme, zda determinant matice koeficientů neznámých SLAE není roven nule.




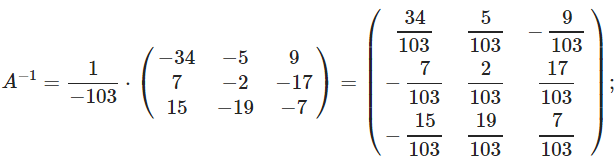
Nyní najdeme sjednocovací matice, transponujte jej a dosaďte do vzorce, abyste určili inverzní matici.

Dosaďte proměnné do vzorce:
Nyní najdeme neznámé vynásobením inverzní matice a sloupce volných členů.

Tak, x=2; y=1; z=4.
Při přechodu z obvyklé formy SLAE na maticovou formu buďte opatrní s pořadím neznámých proměnných v rovnicích systému. Například:

NELZE to napsat takto:

Nejprve je nutné seřadit neznámé proměnné v každé rovnici systému a teprve poté přejít k maticovému zápisu:


Kromě toho musíte být opatrní s označením neznámých proměnných x 1, x 2, …, x n mohou tam být i jiná písmena. Např:

v maticovém tvaru to zapíšeme takto:

Systémy je lepší řešit maticovou metodou lineární rovnice, ve kterém se počet rovnic shoduje s počtem neznámých proměnných a determinant hlavní matice systému není roven nule. Pokud jsou v systému více než 3 rovnice, nalezení inverzní matice bude vyžadovat větší výpočetní úsilí, proto je v tomto případě vhodné použít k řešení Gaussovu metodu.
Účel služby. Pomocí této online kalkulačky se počítají neznámé (x 1, x 2, ..., x n) v soustavě rovnic. Rozhodnutí je provedeno metoda inverzní matice. kde:- vypočítá se determinant matice A;
- přes algebraické sčítání je nalezena inverzní matice A-1;
- v Excelu je vytvořena šablona řešení;
Instrukce. Chcete-li získat řešení pomocí metody inverzní matice, musíte zadat rozměr matice. Dále v novém dialogovém okně vyplňte matici A a vektor výsledků B.
Viz také Řešení maticových rovnic.Algoritmus řešení
- Vypočte se determinant matice A. Pokud je determinant nulový, pak je řešení u konce. Systém má nekonečné množství řešení.
- Když je determinant jiný než nula, inverzní matice A -1 je nalezena pomocí algebraických sčítání.
- Vektor řešení X =(x 1, x 2, ..., x n) získáme vynásobením inverzní matice výsledným vektorem B.
Algebraické sčítání.
| A 1,1 = (-1) 1+1 |
| ∆ 1,1 = (1 (-2)-0 2) = -2 |
| A 1,2 = (-1) 1+2 |
| ∆ 1,2 = -(3 (-2)-1 2) = 8 |
| A 1,3 = (-1) 1+3 |
| ∆ 1,3 = (3 0-1 1) = -1 |
| A2,1 = (-1) 2+1 |
| ∆ 2,1 = -(-2 (-2)-0 1) = -4 |
| A2,2 = (-1) 2+2 |
| ∆ 2,2 = (2 (-2)-1 1) = -5 |
| A 2,3 = (-1) 2+3 |
| ∆ 2,3 = -(2 0-1 (-2)) = -2 |
| A 3,1 = (-1) 3+1 |
| ∆ 3,1 = (-2 2-1 1) = -5 |
| 3 |
| -2 |
| -1 |
X T = (1,0,1)
x 1 = -21 / -21 = 1
x 2 = 0 / -21 = 0
x 3 = -21 / -21 = 1
Zkouška:
2 1+3 0+1 1 = 3
-2 1+1 0+0 1 = -2
1 1+2 0+-2 1 = -1
Používání rovnic je v našich životech velmi rozšířené. Používají se v mnoha výpočtech, stavbě konstrukcí a dokonce i ve sportu. Člověk používal rovnice ve starověku a od té doby se jejich používání jen zvyšuje. Maticová metoda umožňuje nalézt řešení SLAE (systémy lineárních algebraických rovnic) jakékoli složitosti. Celý proces řešení SLAE sestává ze dvou hlavních akcí:
Určení inverzní matice na základě hlavní matice:
Násobení výsledné inverzní matice sloupcovým vektorem řešení.
Předpokládejme, že dostaneme SLAE v následujícím tvaru:
\[\left\(\begin(matice) 5x_1 + 2x_2 & = & 7 \\ 2x_1 + x_2 & = & 9 \end(matice)\right.\]
Začněme řešit tuto rovnici zápisem systémové matice:
Matice na pravé straně:
Definujme inverzní matici. Matici 2. řádu můžete najít následovně: 1 - matice samotná musí být nesingulární; 2 - jeho prvky, které jsou na hlavní diagonále, se prohodí a u prvků vedlejší diagonály změníme znaménko na opačné, načež výsledné prvky vydělíme determinantem matice. Dostaneme:
\[\begin(pmatrix) 7 \\ 9 \end(pmatrix)=\begin(pmatrix) -11 \\ 31 \end(pmatrix)\Šipka doprava \begin(pmatrix) x_1 \\ x_2 \end(pmatrix) =\ begin(pmatrix) -11 \\ 31 \end(pmatrix) \]
2 matice jsou považovány za stejné, pokud jsou jejich odpovídající prvky stejné. V důsledku toho máme pro řešení SLAE následující odpověď:
Kde mohu vyřešit systém rovnic pomocí maticové metody online?
Soustavu rovnic můžete řešit na našem webu. Bezplatný online řešitel vám umožní řešit online rovnice jakékoli složitosti během několika sekund. Vše, co musíte udělat, je jednoduše zadat svá data do řešitele. Na našem webu se také dozvíte, jak rovnici vyřešit. A pokud máte další otázky, můžete se jich zeptat v naší skupině VKontakte.
Uvažujme soustava lineárních algebraických rovnic(SLAU) relativně n neznámý X 1 , X 2 , ..., X n :
Tento systém ve „sbalené“ podobě lze zapsat následovně:
S n i=1 A ij X j = b i , i=1,2, ..., n.
V souladu s pravidlem násobení matic lze uvažovanou soustavu lineárních rovnic zapsat matricový formulář Sekera=b, Kde
 ,
,.
,
,.
Matice A, jehož sloupce jsou koeficienty pro odpovídající neznámé a řádky jsou koeficienty pro neznámé v odpovídající rovnici se nazývá matice systému. Sloupcová matice b, jehož prvky jsou pravými stranami rovnic soustavy, se nazývá matice pravé strany nebo jednoduše pravé straně systému. Sloupcová matice X , jehož prvky jsou neznámé neznámé, se nazývá systémové řešení.
Systém lineárních algebraických rovnic zapsaných ve tvaru Sekera=b, je maticová rovnice.
Pokud systémová matice nedegenerované, pak má inverzní matici a pak řešením systému je Sekera=b je dáno vzorcem:
x=A -1 b.
Příklad Vyřešte systém  maticová metoda.
maticová metoda.
Řešení najdeme inverzní matici pro matici koeficientů systému

Vypočítejme determinant rozšířením podél prvního řádku:

Protože Δ ≠ 0 , Že A -1 existuje.

Inverzní matice byla nalezena správně.
Pojďme najít řešení systému 
Proto, X 1 = 1, x 2 = 2, x 3 = 3 .
Zkouška: 
7. Kronecker-Capelliho věta o kompatibilitě soustavy lineárních algebraických rovnic.
Systém lineárních rovnic má tvar:
a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2, (5.1)
a m1 x 1 + a m1 x 2 +... + a mn x n = b m.
Zde jsou dána a i j a b i (i = ; j = ) a x j jsou neznámá reálná čísla. Pomocí konceptu součinu matic můžeme přepsat systém (5.1) do tvaru:
kde A = (a i j) je matice skládající se z koeficientů pro neznámé soustavy (5.1), která je tzv. matice systému, X = (x 1, x 2,..., x n) T, B = (b 1, b 2,..., b m) T jsou sloupcové vektory složené příslušně z neznámých x j a volných členů b i.
Objednaná kolekce n se nazývají reálná čísla (c 1 , c 2 ,..., c n). systémové řešení(5.1), jestliže se v důsledku dosazení těchto čísel místo odpovídajících proměnných x 1, x 2,..., x n změní každá rovnice systému na aritmetickou identitu; jinými slovy, pokud existuje vektor C= (c 1 , c 2 ,..., c n) T takový, že AC B.
Zavolá se systém (5.1). kloub, nebo řešitelný, pokud má alespoň jedno řešení. Systém se nazývá nekompatibilní, nebo neřešitelný, pokud nemá řešení.
 ,
,
tvořená přiřazením sloupce volných členů na pravou stranu matice A se nazývá rozšířená matice systému.
Otázku kompatibility systému (5.1) řeší následující věta.
Kronecker-Capelliho věta . Systém lineárních rovnic je konzistentní právě tehdy, když se řady matic A aA shodují, tzn. r(A) = r(A) = r.
Pro množinu M řešení soustavy (5.1) existují tři možnosti:
1) M = (v tomto případě je systém nekonzistentní);
2) M se skládá z jednoho prvku, tzn. systém má jedinečné řešení (v tomto případě se systém nazývá určitý);
3) M se skládá z více než jednoho prvku (pak se systém nazývá nejistý). Ve třetím případě má systém (5.1) nekonečný počet řešení.
Systém má jednoznačné řešení pouze tehdy, když r(A) = n. V tomto případě není počet rovnic menší než počet neznámých (mn); pokud m>n, pak m-n rovnic jsou důsledky ostatních. Pokud 0 K řešení libovolné soustavy lineárních rovnic je potřeba umět řešit soustavy, ve kterých je počet rovnic roven počtu neznámých – tzv. Systémy typu Cramer: a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1, a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2, (5.3) ...
... ... ...
... ... a n1 x 1 + a n1 x 2 +... + a nn x n = b n . Systémy (5.3) jsou řešeny jedním z následujících způsobů: 1) Gaussova metoda neboli metoda eliminace neznámých; 2) podle Cramerových vzorců; 3) maticová metoda. Příklad 2.12. Prozkoumejte soustavu rovnic a vyřešte ji, pokud je konzistentní: 5x 1 - x 2 + 2x 3 + x 4 = 7, 2x 1 + x 2 + 4x 3 - 2x 4 = 1, x 1 - 3x 2 - 6x 3 + 5x 4 = 0. Řešení. Vypíšeme rozšířenou matici systému:
Vypočítejme hodnost hlavní matice systému. Je zřejmé, že např. moll 2. řádu v levém horním rohu = 7 0; nezletilí třetího řádu, které ji obsahují, se rovnají nule: V důsledku toho je hodnost hlavní matice systému 2, tzn. r(A) = 2. Chcete-li vypočítat hodnost rozšířené matice A, zvažte hraniční vedlejší to znamená, že hodnost rozšířené matice r(A) = 3. Protože r(A) r(A), systém je nekonzistentní. Rovnice obecně, lineární algebraické rovnice a jejich soustavy, stejně jako metody jejich řešení, zaujímají v matematice, teoretické i aplikované, zvláštní místo. Je to dáno tím, že drtivou většinu fyzikálních, ekonomických, technických a dokonce i pedagogických problémů lze popsat a řešit pomocí nejrůznějších rovnic a jejich soustav. V poslední době si matematické modelování získalo zvláštní oblibu mezi výzkumníky, vědci a odborníky z praxe téměř ve všech oblastech, což se vysvětluje jeho zjevnými výhodami oproti jiným dobře známým a osvědčeným metodám studia objektů různé povahy, zejména tzv. systémy. Existuje velké množství různých definic matematického modelu, které vědci poskytli v různých dobách, ale podle našeho názoru je nejúspěšnější následující tvrzení. Matematický model je myšlenka vyjádřená rovnicí. Schopnost skládat a řešit rovnice a jejich soustavy je tedy nedílnou vlastností moderního specialisty. K řešení soustav lineárních algebraických rovnic se nejčastěji používají metody Cramer, Jordan-Gauss a maticová metoda. Maticová metoda řešení je metoda řešení soustav lineárních algebraických rovnic s nenulovým determinantem pomocí inverzní matice. Pokud vypíšeme koeficienty pro neznámé veličiny xi v matici A, neznámé veličiny shromáždíme ve vektorovém sloupci X a volné členy ve vektorovém sloupci B, pak lze systém lineárních algebraických rovnic zapsat ve tvaru následující maticová rovnice A · X = B, která má jednoznačné řešení pouze tehdy, když determinant matice A není roven nule. V tomto případě lze řešení soustavy rovnic nalézt následujícím způsobem X = A-1 · B, Kde A-1 je inverzní matice. Metoda řešení matrice je následující. Dostaneme soustavu lineárních rovnic s n neznámý: Lze jej přepsat do maticové formy: SEKERA =
B, Kde A- hlavní matice systému, B A X- sloupce volných členů a řešení systému, resp. Vynásobme tuto maticovou rovnici zleva A-1 - matice inverzní k matici A: A -1 (SEKERA) = A -1 B Protože A -1 A = E, dostaneme X= A -1 B. Pravá strana této rovnice udává sloupec řešení původního systému. Podmínkou použitelnosti této metody (stejně jako existence řešení obecně) není homogenní systém lineární rovnice s počtem rovnic rovným počtu neznámých) je nedegenerace matice A. Nezbytnou a postačující podmínkou k tomu je, že determinant matice není roven nule A:det A≠ 0. Pro homogenní soustavu lineárních rovnic, tedy když vektor B = 0
, skutečně opačné pravidlo: systém SEKERA =
0 má netriviální (tedy nenulové) řešení pouze v případě, že det A= 0. Takové spojení řešení homogenních a nehomogenních soustav lineárních rovnic se nazývá Fredholmova alternativa. Příklad řešení nehomogenní soustavy lineárních algebraických rovnic. Ujistíme se, že determinant matice složený z koeficientů neznámých soustavy lineárních algebraických rovnic není roven nule. Dalším krokem je výpočet algebraických doplňků pro prvky matice skládající se z koeficientů neznámých. Budou potřeba k nalezení inverzní matice. .
.













