Կրթության դաշնային գործակալություն
Պետություն ուսումնական հաստատությունբարձրագույն մասնագիտական կրթություն
«ՄԱՏԻ» – Ռուսաստանի պետական տեխնոլոգիական համալսարան Կ.Ե. Ցիոլկովսկին
«Մեքենաների և մեխանիզմների մեխանիկա» բաժին
INVOLUTE GEARS-ի Պրոֆիլավորում
«Մեխանիզմների և մեքենաների տեսություն» թեմայով դասընթացի նախագծման ուղեցույց
Կազմող՝ Գացենկո Ա.Ա. Շուվալովա Լ.Ս.
Մոսկվա 2006 թ
Անդրեյ Ալեքսանդրովիչ Գացենկո Լյուդմիլա Սերգեևնա Շուվալովա
ՄԱՍՆԱԿԱՑՎԱԾ ԱՐՁԱՆՆԵՐԻ ՊՐՈՖԻԼԻԶԳ
ՄԵԹՈԴԱԿԱՆ ՑՈՒՑՈՒՄՆԵՐ
Դեպի դասընթացի ձևավորում դասընթացի համար<<Теория механизмов и машин>>
Խմբագիր Մ.Ա. Սոկոլովա
Ստորագրված է տպագրության համար Հատոր 1.25 pp. Տպաքանակը՝ 150 օրինակ։ Պատվերի թիվ ից
Rotaprint MATI-RGTU, Բեռնիկովսկայա թմբուկ, 14
ԸՆԴՈՒՆՎԵԼԻ ԱՐԺԵՔՆԵՐԻ ՆՇԱՆԱԿՈՒՄՆԵՐԸ ԵՎ ՉԱՓԵՐԸ______ 4.
1. ԸՆԴՀԱՆՈՒՐ ՑՈՒՑՈՒՄՆԵՐ _________________________________________________ 5
1.1. ՍԿԶԲՆԱԿԱՆ ՏՎՅԱԼՆԵՐ _________________________________5
1.2. ԳՈՐԾՄԱՆ ԿԱՐԳ _________________________________ 5
2. ԳԼԱՆՆԱԿԱՆ ԵՐԿՐԱԶԳԱՅԻՆ ՊԱՐԱՄԵՏՐՆԵՐԻ ՀԱՇՎԱՐԿ
SKY INVOLVENT GRES ԱՐՏԱՔԻՆ ՑԱՆՑԱԿԱՆ
Գիտահետազոտական ինստիտուտ _________________________________________________________________ 6 2.1. ՀԱՇՎԱՐԿԻ ՃԻՇՏՈՒԹՅԱՆ ՍՏՈՒԳՈՒՄ_________________8
3. ԵՐԿՈՒ ԱՃԱՆՈՑՆԵՐԻ ԻՆՎՈԼՈՒՏԻ ԿԱՌՈՒՑՈՒՄ
ԱՆՏԱՌ________________________________________________________________9
4. ՄԵՔԵՆԱՅԻՆ ՏԵՂԱՓՈԽՈՂՆԵՐԻ ԿԱՌՈՒՑՈՒՄ_15
4.1. ՍԿԶԲՆԱԿԱՆ ԱՐՏԱԴՐԱԿԱՆ ՇՐՋԱՆԻ ԿԱՌՈՒՑՈՒՄ
ՌԵԻԿԻ _________________________________________________________________15
4.2. ՍԿԶԲԱՆԱԿԱՆ ԱՐՏԱԴՐԱԿԱՆ ԴԱՐԱԿԻ ԴԻՐՔԸ ՈՐՈՇՈՒՄ ԵՆ ԿՏՐՎԵԼԻ ԱՆԻՎԻ ՀԱՄԱՐ ________________15
4.3. ՀԱՏՎԱԾ ԿԵՆՏՐՈՆԻ ԴԻՐՔԸ ՈՐՈՇԵԼՈՎ
ԱՆՏԱՌՆԵՐ________________________________________________________________16
4.4.ԱՐՏ ԳԾԻ ԿԱՌՈՒՑՈՒՄ PN_________________16
4.5. ՁԱԽ ԱՏԱՄԻ ԱՏԱՄԻ ՊՐՈՖԻԼԻ ԿԱՌՈՒՑՈՒՄ______ 16
4.6. ՃԻՇՏ ԱՏԱՄԻ ՊՐՈՖԻԼԻ ԿԱՌՈՒՑՈՒՄ_____17
4.7. ԱՏԱՄԻ ԱՆՑՈՒՄԱՅԻՆ ԿՈՐԻ ԿԱՌՈՒՑՈՒՄ_17
ԳՐԱԿԱՆՈՒԹՅՈՒՆ _________________________________________________18
ԸՆԴՈՒՆՎԱԾ ՆՇՈՒՄՆԵՐ ԵՎ ԱՐԺԵՔՆԵՐԻ ՉԱՓԵՐԸ
m – ներգրավման մոդուլ, մմ Z 1 – փոխանցման ատամների քանակը Z 2 – անիվի ատամների քանակը
Z 1 րոպե – առանց ներքևի կտրված ատամների նվազագույն քանակը – ատամի թեքության անկյուն, աստիճաններ
P – ատամի դարակաշար, մմ
α W – կենտրոնական հեռավորություն, մմ
r 1-ում, r-ում 2-ում – փոխանցումատուփի և անիվի հիմնական շրջանագծերի շառավիղները, մմ r w 1, r w 2 – փոխանցումատուփի և անիվի սկզբնական շրջանների շառավիղները, մմ r 1, r 2 – շառավիղների թեքության շրջանակների շառավիղները: հանդերձում և անիվ, մմ r a 1, r a 2 – փոխանցումատուփի և անիվի գագաթների շրջանակների շառավիղները, մմ
r f 1 ,r f 2 – փոխանցումատուփի և անիվի խոռոչների շրջանակների շառավիղները, մմ ρ և – ատամի ցողունի կլորացման շառավիղը, մմ
h – հանդերձում կամ անիվի ատամի բարձրություն, մմ H PC – դարակի ատամի ընդհանուր բարձրություն, մմ
S – դարակի ատամի բարձրության հաստությունը, մմ
S 1 , S 2 - ատամների հաստությունը հանդերձանքի և անիվի թեքության շրջանագծի աղեղի երկայնքով, մմ
S а1, S а2 – ատամների հաստությունը պինիոնի և անիվի գագաթների շրջանագծի աղեղի երկայնքով, մմ
P 1X, P 2X - ատամի անկումներ հանդերձանքի և անիվի թեքության շրջանագծի լարերի երկայնքով, մմ
α - պրոֆիլի անկյունը նորմալ է բնօրինակի եզրագծին, deg α t – սկզբնական պրոֆիլի ծայրային պրոֆիլի անկյուն, deg
α W1 , α W2 – հանդերձում և անիվի միացման անկյուններ, աստիճաններ
τ 1, τ 2 - փոխանցումատուփի և անիվի անկյունային ատամների բարձրություններ, X 1 աստիճաններ - փոխանցումների տեղաշարժի գործակից
X 2 - անիվի տեղաշարժի գործակիցը
X 1 րոպե – նվազագույն տեղաշարժի գործակիցը փոխանցումատուփը կտրելիս.
y – հավասարեցման կողմնակալության գործակից
h* a – սկզբնական եզրագծի գլխի բարձրության գործակիցը
ε α – պտտվող հանդերձանքի վերջի համընկնման գործակիցը ε β – պտուտակաձև հանդերձի վերջի համընկնման գործակիցը ε γ – համընկնման ընդհանուր գործակիցը λ 1, λ 2 – հանդերձանքի և անիվի սայթաքման գործակիցները υ – հատուկ ճնշման գործակից:
1. ԸՆԴՀԱՆՈՒՐ ՑՈՒՑՈՒՄՆԵՐ.
TMM-ի դասընթացի նախագծի երրորդ թերթիկում կատարվում է պտտվող պտտվող հանդերձանքի ձևավորում, որը պարունակում է հաշվարկային և գրաֆիկական մասեր:
Հաշվարկային մասը ներառում է երկրաչափական պարամետրերի որոշումը հանդերձում անիվներև որոշ որակի փոխանցման ցուցանիշներ:
Գրաֆիկական մասը կատարվում է A1 ֆորմատի թերթիկի վրա։ Դասընթացի նախագծի այս մասը պարունակում է.
ա) մեքենայի հանդերձանքի ներգրավումը դարակով. բ) շարժակների ոլորուն փոխանցում:
1.1. Նախնական տվյալներ
1) Փոխանցման ատամների քանակը- Z 1 և անիվներ -Z 2:
2) մոդուլ՝ մ, մմ.
3) Դարակի և պինոնի գործիքի նախնական ուրվագծի պարամետրերը ըստ ԳՕՍՏ-ի
13755-81: α =20°;h a * = 1;C* = 0.25;ρ և = 0.38m,
որտեղ α-ն դարակի ատամի պրոֆիլի անկյունն է;
h a * - գլխի բարձրության գործակից, C * - ճառագայթային մաքրման գործակից;
ρ և - կորության շառավիղ, մմ
1.2. Գործողության կարգը
1) Հաշվարկել երկրաչափական պարամետրերը:
2) Կառուցեք հաստոցային և գործիքային հանդերձանք
3) Կառուցեք ոլորուն փոխանցման միացում և հանդերձում անիվ.
4) Ցույց տվեք ատամի պրոֆիլի ակտիվ հատվածները շփման ատամների կողային մակերեսների վրա:
5) Հիմնված գրաֆիկական շինարարությունորոշել վերջի համընկնման գործակիցըε α և համեմատեք այն ε α ras-ի հաշվարկված արժեքի հետ.
εα | ε α− ε αras | 100% . |
|
εα |
|||
2. ԱՐՏԱՔԻՆ ՀԱՂՈՐԴԱԳՐԱԿԱՆ ՀԵՏԱՑՄԱՆՆԵՐԻ ԵՐԿՐԱԶԳԱՅԻՆ ՊԱՐԱՄԵՏՐՆԵՐԻ ՀԱՇՎԱՐԿ.
ԱՐՁԱՆՆԵՐ.
Ընտրեք տեղաշարժի X 1 և X 2 գործակիցների արժեքը՝ հաշվի առնելով ԳՕՍՏ 16532-70-ի առաջարկությունները հզորության համար շարժակների. Այս առաջարկությունները ներկայացված են Աղյուսակ 1-ում:
Հետևյալ պայմանը պետք է պահպանվի.
Օֆսեթ գործոն | Կիրառման տարածք |
||
10 ≤ Z 1 ≤ 30 |
|||
Z 1 > 30 |
|||
Որոշեք միացման անկյունը α W
invα W = invα + | 2 (X 1+ X 2) | tgα. | |
Z 1+ Z 2 | |||
Պրոֆիլի inv α անկյան անկյան արժեքները տրված են Աղյուսակում: 2.
Աղյուսակ 2. inv α պրոֆիլի անկյան անկյան արժեքը:
ինվա | |||||||
ինվա | |||||||
ինվա | |||||||
ինվա | |||||||
Նշում սեղանին 2. Ներխուժման պրոֆիլի անկյան միջանկյալ արժեքները inv α որոշվում են գծային ինտերպոլացիայով:
Որոշեք ընկալվող տեղաշարժի գործակիցը
Z 1+ Z 2 | cosα | |||
− 1. |
||||
cosα Վ | ||||
Որոշեք հավասարեցման կողմնակալության գործակիցը
y = (X1 + X2 ) - y.
Որոշեք հիմնական շրջանագծերի շառավիղները
r 1,2= r 1, 2cos α-ում
r W1 | |||||||||
u+1 |
|||||||||
r W2 | |||||||||
որտեղ u = | |||||||||
Փոխանցման հարաբերակցությունը. |
|||||||||
Որոշեք անիվի վերին շրջանների շառավիղները
ա 1, 2 | + (h * +X | − y) մ |
|||
Որոշեք անիվի իջվածքների շրջանագծերի շառավիղները
r f 1, 2= r 1, 2− (h a * + C * − X 1, 2) m
Գտեք անիվի ատամների բարձրությունը
h = m(2 հա * + C* − y)
Որոշեք ատամների հաստությունը գագաթային շրջանագծի վրա
tgα | ||||||||||
r 1.2-ում | ||||||||||
S a 1.2 | 2 r a 1.2 | Invα − invar ccos | ||||||||
ա 1.2 | ||||||||||
Որոշեք փոխանցման վերջի համընկնման գործակիցը
2 π1 | |||||||||||||||||
α a 1.2 | Arccos | r 1.2-ում | |||||||||||||||
r a 1.2 | |||||||||||||||||
Գտեք անկյունը կենտրոնների գծի և ատամի համաչափության առանցքի միջև
h 1.2= r a 1.2sin ϕ 1.2
Գտեք անկյունը հարակից ատամների սիմետրիայի առանցքների միջև
Որոշեք կենտրոնական գծի և համաչափության առանցքի հատման կետի միջև հեռավորությունը հարակից ատամըգագաթների շրջանով
h 1.2* = r a 1.2sin(γ 1.2− ϕ 1.2) |
2.1. Հաշվարկի ճշգրտության ստուգում
Որոշեք կենտրոնից կենտրոն հեռավորությունը թեքության շրջանակների շառավիղներով և համեմատեք այն (4) հավասարման մեջ ստացված արժեքի հետ։
Ստուգեք, որ ատամները սրված չեն: Փոխանցման և անիվի ատամների համար առաջարկվող ոչ սրվող պայմանը, համապատասխանաբար.
Sa1.2 ≥ 0.25 մ

3. ԵՐԿՈՒ ԱՆԻՎՆԵՐԻ ԽԱՂԱՐԿՈՒԹՅԱՆ ԿԱՌՈՒՑՈՒՄ.
Հաշվարկելով հանդերձանքների բոլոր հիմնական չափերը՝ օգտագործելով բանաձևերը
(1)…(20), սկսեք պատկերել տարրերը հանդերձում. Շինարարությունը կատարվում է թերթիկի ձախ կեսի մասշտաբով
3.1. Գծեք փոխանցման կենտրոնների գիծ, որի վրա կենտրոնական հեռավորությունը գծագրվում է ընտրված մասշտաբով a W =O 1 O 2 (նկ. 1):
3.2. O 1 և O 2 կենտրոններից գծված են շրջանակներ. սկզբնական շրջաններ W1 շառավղով
և r W2 դիպչելով կապակցման շերտի P կետին. բաժանարար -r 1 և r 2, հիմնարար
գագաթները r in1 և r in2 են, գագաթները՝ r a1 և r a2, ստորինները՝ r f1 և r f2։
Հետագա սխալներից խուսափելու համար դուք պետք է ստուգեք մի անիվի վերևի և մյուս անիվի ներքևի շրջանների միջև հեռավորությունը,
![]()
չափվում է կենտրոնական գծի երկայնքով, այսինքն. ճառագայթային բացթողման չափը, որը պետք է հավասար լինի C*m-ի:
3.3. P կետի միջով N 1 և N 2 կետերի հիմնական շրջանագծերին շոշափող N 1 N 2 գիծ գծեք այնպես, որ այն թեքված լինի դեպի շարժիչ փոխանցման անիվի պտույտը: Ցույց տվեք միացման անկյունը α W՝ օգտագործելով ձգման գիծը և ուղղահայաց kO 1 O 2-ը, որը գծված է կապի P բևեռի միջով: N 1 O 1 և N 2 O 2 ուղիղները ուղղահայաց են ներգրավման գծին և O 1 O 2 կենտրոնների գծով նաև α W-ին հավասար անկյուն են կազմում:
Հ.4. Կառուցեք պտտվող անիվներ, որոնք դիպչում են փոխանցման բևեռին P և սահմանափակվում են հիմնական շրջանագծերով՝ պտույտի սկիզբով, և գագաթների շրջանակներով՝ պտտվող ատամի պրոֆիլների ծայրով (նկ. 2):
Առաջին անիվի պտույտը, որը նկարագրվում է NP ուղիղ գծի P կետով, երբ վերջինս գլորվում է առանց հիմնական շրջանի երկայնքով սահելու, կառուցված է հետևյալ հաջորդականությամբ.
ա) N 1 P հատվածը բաժանված է կամայական թվով հավասար մասերի «a». Այս դեպքում, որքան կարճ է հատվածների ընտրված երկարությունը, այնքան ավելի ճշգրիտ կհամընկնի աղեղի երկարության հետ: Խորհուրդ է տրվում N 1 P հատվածը բաժանել երեք հավասար մասերի։ N 1 կետը նշանակենք «3» թվով;
Ձեզ անհրաժեշտ կլինի
- - համակարգիչ՝ տեղադրված համակարգչային նախագծման համակարգով.
- - թղթի վրա նկարելու համար նկարչական գործիքներ (նախշեր, քանոններ, մատիտներ);
- - հետագծող թուղթ կամ թուղթ;
- - տպիչ կամ պլոտեր գծագիրը տպելու համար (անհրաժեշտության դեպքում):
Հրահանգներ
Ընտրեք այն նյութը, որն անհրաժեշտ է հանդերձանքը հաշվարկելու համար: Դա անելու համար ձեզ հարկավոր է ԳՕՍՏ 16532-70 տեքստը շարժակների երկրաչափությունը հաշվարկելու վերաբերյալ: Դուք կարող եք օգտագործել այլ տեղեկատու գրքեր, օրինակ. հատուկ գրքերնման փոխանցումների հաշվարկի համար, որը ցույց կտա անհրաժեշտ բանաձևերը:
Պարզեք նախնական տվյալները, որոնք ձեզ անհրաժեշտ կլինեն հանդերձանքի գծագրումն ավարտելու համար: Սովորաբար, ատամների սկզբնական ուրվագիծը և հանդերձանքի պատկերը կառուցելու համար պահանջվում են այնպիսի պարամետրեր, ինչպիսիք են փոխանցման մոդուլը և ատամների քանակը: Ատամների սկզբնական եզրագծի չափերն ու ձևը պետք է համապատասխանեն ԳՕՍՏ 13755-81-ին:
Նկարեք հանդերձանքի գծագիր՝ հետևելով ԳՕՍՏ 2.403-75 և ԳՕՍՏ 2.402-68-ում սահմանված կանոններին: Որպես կանոն, կտրվածքով մեկ տեսակը բավարար է։ Մի մոռացեք, որ հանդերձանքի պատկերը պետք է ցույց տա ատամների վերին մասերի տրամագիծը, օղակաձև հանդերձի լայնությունը, ատամների եզրերի կլորացված շառավիղները կամ փորվածքի չափերը և ատամների կողային մակերեսների կոշտությունը: Եթե հանդերձանքը պարունակում է լրացուցիչ կառուցվածքային տարրեր (ակոսներ, անցքեր, խորշեր և այլն), որոնք հնարավոր չէ մեկ տեսքում, գծեք լրացուցիչ տեսք:
Նկարի վրա տեղադրեք հանդերձանքի օղակաձև հանդերձանքի պարամետրերի աղյուսակ: Աղյուսակը պետք է բաղկացած լինի երեք մասից, որոնք միմյանցից բաժանված են ամուր հիմնական գծով։ Առաջին մասում նշեք հիմնական տվյալները՝ մոդուլը, ատամների քանակը, նորմալ սկզբնական ուրվագիծը, տեղաշարժի գործակիցը, ճշգրտության աստիճանը և զուգավորման տեսակը։ Տրամադրեք ատամի սկզբնական ուրվագծի պատկերը՝ անհրաժեշտ չափսերով, եթե աղյուսակում նշված պարամետրերը բավարար չեն այն որոշելու համար։ Աղյուսակի երկրորդ մասում մուտքագրեք տվյալներ՝ հակառակ ատամների պրոֆիլների հարաբերական դիրքը վերահսկելու համար: Աղյուսակի երրորդ մասում նշեք հանդերձանքի բարձրության տրամագիծը և այլ հղման չափերը:
16 փական VAZ-2110-2112 շարժիչների վրա բաժանված հանդերձանքը կարգավորելու համար տեղադրեք լիսեռներ՝ ճեղքված փոխանցումներով: Ելնելով ստանդարտ շարժակների նշաններից, մոտավորապես սահմանեք փականի համընկնումները: I և IV բալոնների մխոցները տեղափոխեք TDC և միացրեք ժամանակի գոտին: Տեղադրեք հավաքիչի ցուցիչները և դրանց բարը (այս ցուցանիշները որոշում են փականների շարժումները և TDC դիրքերը): Գտեք IV մխոցի արտանետման և ընդունման փականների փակ (զրոյական) դիրքերը: Դրանից հետո, օգտագործելով պառակտված փոխանցումներ և ցուցիչներ, սահմանեք ընդունման և արտանետման փականների համընկնումները: Ձգեք ամրացնող պտուտակները բաժանված շարժակների վրա: Նորից հավաքեք շարժիչը և կատարեք թեստային դրայվ:
8-փականանի դասական VAZ մեքենաների վրա բաժանված շարժակների տեղադրում: Տեղադրելով ճարմանդային լիսեռը պառակտված հանդերձումով, օգտագործեք ստանդարտ հանդերձանքի նշանները փականի համընկնումները մոտավորապես կարգավորելու համար: I և IV բալոնների մխոցները տեղափոխեք TDC և դրեք ժամանակացույցի շղթան: Տեղադրեք հավաքիչի ցուցիչները, որոնց ոտքերը հենված են ճոճանակներին:
Հերթական կերպով դնելով I մխոցի փականների փակ դիրքերը և TDC-ի ճշգրիտ դիրքը, տեղադրեք անհրաժեշտ փականների համընկնումները ճեղքված հանդերձանքի երկայնքով: Մի մոռացեք ճոճվող փոխանցման գործակիցների և ցուցիչի վրա դրված կետի մասին: Սա կդարձնի առաստաղների ճշգրտումներ: Հավասար փուլային լիսեռ տեղադրելու դեպքում պարզապես գտեք դրա զրոյական դիրքը (երբ բոլոր փականները հավասարապես բաց են)՝ անտեսելով ռոքերի բազմապատկիչների արժեքները: Կողպեք բաժանված հանդերձանքը, հավաքեք շարժիչը և գործարկեք այն:
Փոխանցումը փոխանցումատուփի մեխանիզմի մի մասն է, որը ծառայում է էլեկտրական շարժիչի հզորությունը աշխատող մեքենային փոխանցելու համար: Այս անիվները առավել հաճախ օգտագործվում են ուղիղ և թեք ատամներով գլանաձև և թեք շարժակների մեջ:

Հրահանգներ
Ուղիղ ատամներով շարժակներ օգտագործվում են ուղիղ իրականացնելու համար ռոտացիոն շարժումշարժիչ լիսեռ դեպի շարժիչ լիսեռ: Եթե նման շարժումն իրականացվում է ցանկացած անկյան տակ, ապա օգտագործվում են թեք կամ թեք շարժակներ, որոնցում ատամն իր երկարությամբ ունի փոփոխական մոդուլ։
Շրջանակի սկզբնական մեծ տրամագծի երկայնքով գծված են թեք շարժակներ, ուստի իջվածքները չեն գծվում հիմնական տեսքում:
Գծանկար պատրաստելու համար չափեք և հաշվարկեք փոխանցման անիվի բոլոր տարրերը ԳՕՍՏ 9563-60-ի համաձայն: Որոշեք ելուստների արտաքին տրամագիծը, ատամները De, միացման մոդուլը t, սկզբնական շրջանի տրամագիծը d, քայլը t, ատամի բարձրությունը L, ատամի գլխի բարձրությունը h», ատամի ցողունի բարձրությունը L», ներքին շրջանի տրամագիծը Di, ատամի հաստությունը s, խոռոչի լայնությունը se, աշխատանքային անիվի լայնությունը b, հանգույցի երկարությունը 1X, լիսեռի անցքի տրամագիծը dt, հանգույցի արտաքին տրամագիծը d2: Բոլոր տառերի նշանակումներն ընդունված են OST VKS 8089-ի համաձայն:
Սովորաբար, ատամի պրոֆիլները գծվում են պարզեցված ձևով, օգտագործելով շրջանաձև աղեղներ: Հաստ հիմնական գծով գծե՛ք տրված De, d, Di տրամագծերի շրջանակներ: Օգտագործելով բարակ գիծ, գծեք լրացուցիչ շրջան, որի երկայնքով գտնվում են ատամի պրոֆիլը ուրվագծող աղեղները:
Տեղադրեք լրացուցիչ տեղեկություններ ներգրավման մոդուլի, ատամների թեքության քանակի և անկյան մասին և այլն պարամետրերի աղյուսակում՝ համաձայն ԳՕՍՏ 9250-59-ի, որը գտնվում է գծագրի վերին աջ անկյունում:
Տեսանյութ թեմայի վերաբերյալ
Նշում
Նաև, ԳՕՍՏ 2.403-75 ESKD-ի համաձայն, գծվում է հանդերձանքի պրոֆիլային հատված: Գծե՛ք շրջանագծերը ցույց տվող գծերը և ատամների ելուստների մակերեսները որպես ամուր հիմնական գիծ: Գոգավորությունների շրջանագիծը ցույց տվող գծերը գծիկ են։ Մի ստվերեք ատամները, որոնք ընկնում են կտրված հարթության մեջ:
Փոխանցումների հանրաճանաչությունը բացատրվում է դրանց բարձր արդյունավետությամբ, բարձր բեռնվածությամբ, փոքր չափսերով, ամրությամբ, ամրությամբ, օգտագործման հեշտությամբ և հուսալիությամբ: Թերությունները ներառում են հաշվարկի և տեղադրման ճշգրտության բարձր պահանջներ:
Երբ պտտվում են հանդերձանքն ու դրա հետ միացած ատամնավոր անիվը, զարմանալի բան է տեղի ունենում՝ աչքի համար աննկատ։ Երբ փոխանցումատուփի ատամի և անիվի ատամի կողային մակերեսները շփվում են, գրեթե սայթաքում չի լինում: Փոխանցման ատամի պրոֆիլը գլանափաթեթներ...
Անիվի ատամի պրոֆիլի երկայնքով մի փոքր սայթաքումով:
Ինչու և ինչպես է դա հնարավոր: Որովհետև ատամների աշխատանքային մակերեսները ոլորուն գլանների կողային մակերեսներն են: Անիվի ծայրը (ավելի ճիշտ՝ ատամի մի մասը) այս գլանի հիմքն է։ Վերջնական հարթության և վերը նշված գլանների հատումը կոր է, որը կոչվում է ինվոլյուտ:
Ժամանակակից գիտությունը հոլանդացի փայլուն գիտնական Քրիստիան Հյուգենսին համարում է «էվոլյուտների և ինվոլյուտների հայր»: Հյուգենսը հայտնաբերեց (կամ ստեղծեց) այս կորերի տեսությունը 1654 թվականին։
Երբ դու 17 տարեկան ես, 1654 թվականը անհավանական հեռու է թվում: Բայց այսօր, երբ ես շատ ավելի մեծ եմ, հասկանում եմ, որ տատիկս՝ ծնված 1892 թվականին, տեսել և լսել է իր մանկության ծերերին՝ Պուշկինի ժամանակակիցներին, և նույնիսկ, հավանաբար, Նապոլեոնի, և 21-րդ դարի սկզբից մինչև առաջին. 19-ի կեսն արդեն «ձեռքի տակ է». Մտերիմ մեկի աչքերը, որոնց մեջ բազմիցս նայեցի, տեսան մարդկանց, ովքեր ապրել են 19-րդ դարի առաջին կեսին։ Անհավանական! Եվ ահա, նույնքան էլ՝ Հյուգենսի ժամանակները...
Փոխանցման մեխանիզմի սայթաքումը նվազագույնի հասցնելը ապահովում է փոխանցման շատ բարձր արդյունավետություն և ատամների պրոֆիլների մաշվածության զգալի նվազում, քանի որ պտտվող շփման գործակիցը առնվազն մի կարգով ցածր է, քան սահող շփման գործակիցը:
Բոլոր ինժեներները և մաթեմատիկոսները գիտեն, թե ինչպես կառուցել շրջանագծի պարզ ոլորուն: Դատելով ինտերնետ ֆորումներից, միայն մի քանի հոգի գիտեն, թե ինչպես կառուցել ատամի պրոֆիլը ներծծված և անցումային կորով:
Ո՞ւմ է սա պետք և ինչու:
Նախ՝ մեքենաշինության մասնագիտությունների ուսանողների համար դասընթացմեխանիզմների և մեքենաների տեսության վրա։
Երկրորդ, շարժիչների և կտրող գործիքների դիզայներներին:
Երրորդ, պլազմային կտրող, էլեկտրաէոզիվ և լազերային մեքենաների շարժակների արտադրողներին:
Դա երրորդ խումբն է, որին հուսով եմ, որ ստորև ներկայացված ալգորիթմը հատկապես օգտակար կլինի:
Ատամի պրոֆիլային կետերի կոորդինատների հաշվարկ Excel-ում:
Ծանր ու բավականին բարդ հաշվարկներ կատարելու համար մենք գործարկում ենք MS Excel ծրագիրը։ Այս հաշվարկը կարող եք կատարել նաև Calc ծրագրում անվճար գրասենյակային փաթեթներից Apache OpenOffice կամ LibreOffice.
Համար պտուտակավոր անիվներպրոֆիլը կառուցված է վերջնական հատվածի համար:
Նախնական տվյալներ.
Ատամի պրոֆիլը «կկտրենք» դարակավոր գործիքով` սանր կամ սալահատակ: Մենք կվերցնենք սկզբնական սխեմայի պարամետրերը և գործակիցները ԳՕՍՏ 13755-81-ի համաձայն: Նայեք բուն ռելսի գծագրին և հասկացեք, թե ինչ է դա:
D3-D6 բջիջների առաջին չորս պարամետրերը բնութագրում են սկզբնական ուրվագիծը:
D7-D11 բջիջների հաջորդ հինգ նախնական տվյալները հանդերձանքի «անձնագիրն» են՝ տրամադրելով դրա մասին համապարփակ տեղեկատվություն:
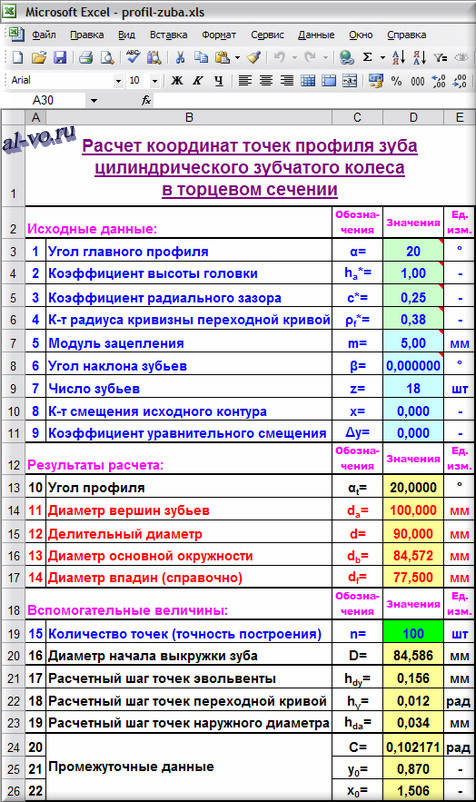
Հաշվարկման ալգորիթմ.
Պրոֆիլի անկյան և բոլոր տրամագծերի հաշվարկների արդյունքները ստացվել են հետևյալ բանաձևերի միջոցով.
10. α տ =arctg(tg(α )/cos (β ))
11. դ ա = դ +2* մ *(հ ա * + x — Δ y )
12. դ = մ * զ /cos(β )
13. դ բ = դ * cos (α տ )
14. Դ Ֆ = դԱ -2* մ *(2*h a * +c* —Δ y)
Ատամի պրոֆիլի մի մասը տրամագծով հիմնական շրջանի ներծծումն է դ բ. Այսպիսով, ատամնաշարի մեջ կարող է գոյություն ունենալ ինվոլյուտ՝ հիմնական շրջանագծի տրամագծից մինչև ատամի ծայրերի տրամագիծը:
Ատամի պրոֆիլի երկրորդ մասը անցումային կորն է ինվոլյուտից դեպի խոռոչների տրամագիծը:
Ես ընտրել եմ միավորների քանակը nկորերից յուրաքանչյուրն իր օրինակի համար հավասար է 100-ի՝ այն համարելով բավարար շինարարության պահանջվող ճշգրտության համար: Եթե ցանկանում եք փոխել այն, ապա ձեզ հարկավոր է համապատասխանաբար ընդլայնել կամ նեղացնել «Ատամի պրոֆիլի կետերի կոորդինատները» աղյուսակը, որը պարունակում է 100 տող ( i max =n).
Օժանդակ հաստատունների արդյունքները որոշվում են բանաձևերով.
16. Դ =2*m *((z /(2*cos (β )) — (1-x)) 2 +((1-x)/tg (α տ )) 2) 0,5
17. h dy =(d a -d b)/(n -1)
18.ժ γ =γ 1/(n -1)
19. ժդա =2*Xհա 1 /(n -1)
20. Գ=(π/2+2*x *tg (α ))/z +tg (α տ ) — α տ
21. y 0=1- (ρ զ *)* մեղք (α տ ) -x
22. x 0= π / (4 * cos (β ))+(ρ զ * ) * cos (α տ ) + tg (α տ )
Նախապատրաստումն ավարտված է, դուք կարող եք հաշվարկել միջանկյալ տվյալները և ուղղակիորեն ատամի պրոֆիլային կետերի կոորդինատները Excel-ում:

Աղյուսակում նշված արժեքները հաշվարկվում են բանաձևերով.
d y1 =d a
d y (i+1) =d yi -h dy
d y (n) =d բ
D i =arccos (d b /d yi ) -tg (arccos (d b /d yi ))+C
γ 1 =π/2-α տ
γ (i+1) = γ ես -հ γ
A i =z /(2*cos(β )) - y 0 — (ρ զ * ) * cos (γ ես )
B i =y 0 *tg(γ ես ))+(ρ զ *)* մեղք (γ ես)
φ ես = (2 * cos(β )/զ )*(x 0 +y 0 *tg (γ ես ))
Յհաես =(d yi /2)*cos (D i)
Xհաես =Yհաես *tg (D i)
ՅԱՀես =(A i *cos (φ ես ) + B i * sin (φ ես ))*մ
XԱՀես =(A i * sin (φ ես ) -B i *cos (φ ես ))*մ
X da1 =-Xհա 1
X da (i+1) =X dai +hդա
Y dai =((դԱ /2) 2 — X dai 2) 0,5
Excel-ում հաշվարկն ավարտվելուց հետո մենք գործարկում ենք գծապատկերի հրաշագործը և ստացված կոորդինատների միջոցով կառուցում ենք ցրման սյուժեներ: Ինչպես է դա արվում, մանրամասն նկարագրված է:

Վերևի սքրինշոթում արտաքին տրամագիծը ցուցադրված է կապույտով, ինվոլյուտները՝ մուգ կապույտով, իսկ անցումային կորերը՝ մանուշակագույնով:
X և Y առանցքները հատվում են անիվի կենտրոնում - սա սկզբնակետն է:
Excel-ը ստեղծել է ատամի պրոֆիլ: Խնդիրը լուծված է։
Փոխելով նախնական տվյալները՝ դուք կարող եք ակնթարթորեն տեսողականորեն գնահատել ատամի պրոֆիլի փոփոխությունները և տեսնել ցողունի կտրվածքը կամ ծայրի սրացումը՝ ուրվագծային օֆսեթ կիրառելիս:
Արդյունքներ.
Հանդեսի ամբողջական իրական ուրվագիծը գծելու համար դուք պետք է վերցնեք մեկ ատամի պրոֆիլային կետերի կոորդինատները և կառուցեք շղթա՝ օգտագործելով այս կետերը ցանկացած հասանելի CAD ծրագրում: Այնուհետև պետք է այն շրջագծով բազմապատկել ատամների քանակով, լրացնել խոռոչների տրամագիծը և ստանալ DXF գծագիր։ Ունենալով գծագիր՝ հեշտ է գրել CNC մեքենայի կառավարման ծրագիր և արտադրել մի մաս:
Շատ CAD ծրագրեր կարող են ստեղծել փոխանցումատուփի անիվի ուրվագիծը առանց նկարագրված քայլերի, բայց ուրվագիծը, ցավոք, շատ դեպքերում իրական չի լինի:
Կա մի հետաքրքիր ծրագիր, որը կոչվում է Gear Template Generator, որը ստեղծում է հանդերձանքի ուրվագծերի DXF ֆայլեր (http://woodgears.ca/gear/index.html): Այնուամենայնիվ, կոնստրուկցիաների նախնական տվյալները ինչ-որ տեղ անսովոր են... իսկ ատամի խոռոչներն առանց ճառագայթային մաքրման են։
Նշեմ, որ ներբեռնման համար առաջարկվող Excel ֆայլը՝ ատամի պրոֆիլի հաշվարկներով այս դեպքումլիարժեք ծրագիր չէ և օգտվողից պահանջում է MS Excel-ի տարրական գիտելիքներ և խնդրի երկրաչափության իմացություն:
Մասնավորապես, աղբյուրի տվյալները փոխելիս դուք պետք է ձեռքով կարգավորեք առանցքների սանդղակները և համոզվեք, որ X առանցքի երկայնքով սանդղակը հավասար է Y առանցքի երկայնքով սանդղակին (գծերի ցանցը պետք է կազմի քառակուսիներ, ոչ թե ուղղանկյուններ): Կոորդինատները CAD ծրագրին փոխանցելիս ինվոլյուտի և անցումային կորի միացման կետը պետք է ձեռքով կարգավորվեն՝ կտրելով կորերի ավելորդ մասերը:
Ներկայացված ալգորիթմը գրվել է (մտածելը սարսափելի է) 1992 թվականին ծրագրավորվող հաշվիչի համար և նախատեսված էր գծատախտակի վրա օպտիկական հղկող մեքենաների կառավարման էկրաններ նկարելու համար:
աղաչում եմ ՀԱՐԳԵԼՈՎ հեղինակի աշխատանքի ներբեռնման ֆայլ ԲԱԺԱՆՈՐԴԱԳՐՎԵԼՈՒ ՀԵՏՈ հոդվածների հայտարարությունների համար։
Հարգելի ընթերցողներ, խնդրում ենք գրել հարցեր, ակնարկներ և մեկնաբանություններ էջի ներքևում գտնվող մեկնաբանություններում:
Բլոգում կան մի քանի հոդվածներ, որոնք նվիրված են հանդերձում (և այլ) շարժակների: Դրանք գտնելու ամենադյուրին ճանապարհը գնալով «Բլոգի բոլոր հոդվածները» էջն է՝ օգտագործելով ստորև նշված հղումը.
Նմանատիպ թեմաներով հոդվածներ
Կարծիքներ
34 մեկնաբանություն «Ինչպե՞ս ստեղծել ատամների ճշգրիտ պրոֆիլ» թեմայով:
- Եվգենի 24 սեպտ 2015 12:10
- Ալեքսանդր Վորոբյով 24 սեպտ 2015 14:28
- Ալեքսանդր Վորոբյով 23 Փետրվար 2016 10:31
- 4APK 05 Մարտ 2016 13:49
- Ալեքսանդր Վորոբյով 05 Մար 2016 16:01
- Յարոսլավ 11 ապրիլի 2016 13:22
- Ալեքսանդր Վորոբյով 11 Ապրիլ 2016 13:38
- Սերգեյ Էրմոլինսկի 14 Հուն. 2016 20:16
- Եվգենի 08 Դեկ 2016 16:25
- Վլադիմիր 11 Հունվար 2017 18:52
- Ալեքսանդր Վորոբյով 11 Հունվար 2017 19:43
- Վիտալի 17 Հուն 2017 22:01
- Ալեքսանդր Վորոբյով 17 Հուն 2017 23:20
- Grayling 09 Փետրվար 2017 23:38
- Ալեքսանդր Վորոբյով 10 Փետրվար 2017 22:50
- Անատոլի Մարտ 06, 2017 21:18
- Ալեքսանդր Վորոբյով 06 Մարտ 2017 23:29
- Արտեմ 26 Մարտ 2017 21:06
- Ալեքսանդր Վորոբյով 26.03.2017 22:19
- Ալեքսանդր 02 Ապրիլ 2017 03:22
- Ալեքսանդր Վորոբյով 02 Ապրիլ 2017 11:27
- Ալեքսանդր 02 Ապրիլ 2017 23:09
- Ալեքսանդր Վորոբյով 04 Ապրիլ 2017 11:43
- Ալեքսանդր 08 Ապրիլ 2017 23:22
- Ալեքսանդր Վորոբյով 09 Ապրիլ 2017 00:06
- Վլադիմիր 03 Մայիսի 2017 00:30
- Ալեքսանդր Վորոբյով 03 մայիսի, 2017 08:38
- Իգոր 07 Հունիս 2017 19:00
- Ալեքսանդր Վորոբյով 07 Հունիս 2017 20:32
- Անատոլի 10 Հոկ 2017 20:09
- Ալեքսանդր Վորոբյով 10 Հոկ 2017 23:07
- Անատոլի 17 Հոկտ. 2017 19:16
- Ալեքսանդր Վորոբյով 17 Հոկ 2017 21:40
- Անատոլի 18 Հոկտեմբեր 2017 12:39

 Echo HSG խողովակների անցանելիություն")





