ನೀವು ಗ್ರೇಡಿಯಂಟ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಉತ್ತಮವಾದ ಬಿಂದುವನ್ನು ಹುಡುಕಬಹುದು, ಆದರೆ ಪ್ರಸ್ತುತಕ್ಕಿಂತ ಉತ್ತಮವಾದ ಯಾವುದನ್ನಾದರೂ ಹುಡುಕಬಹುದು.
ಎಲ್ಲಾ ಸ್ಥಳೀಯ ಆಪ್ಟಿಮೈಸೇಶನ್ ವಿಧಾನಗಳನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸಲು ಸುಲಭವಾಗಿದೆ. ಸಾಕಷ್ಟು ಹೊಂದಿದೆ ದುರ್ಬಲ ಪರಿಸ್ಥಿತಿಗಳುಒಮ್ಮುಖವಾಗುವುದು, ಆದರೆ ಒಮ್ಮುಖದ ದರವು ತುಂಬಾ ಕಡಿಮೆಯಾಗಿದೆ (ರೇಖೀಯ). ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನದ ಹಂತವನ್ನು ಹೆಚ್ಚಾಗಿ ಫ್ಲೆಚರ್-ರೀವ್ಸ್ ವಿಧಾನದಂತಹ ಇತರ ಆಪ್ಟಿಮೈಸೇಶನ್ ವಿಧಾನಗಳ ಭಾಗವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ವಿವರಣೆ [ | ]
ಸುಧಾರಣೆಗಳು[ | ]
ಕಂದರದ ಉದ್ದಕ್ಕೂ ಚಲಿಸುವಾಗ ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ವಿಧಾನವು ತುಂಬಾ ನಿಧಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಅಸ್ಥಿರಗಳ ಸಂಖ್ಯೆ ಹೆಚ್ಚಾದಂತೆ ವಸ್ತುನಿಷ್ಠ ಕಾರ್ಯವಿಧಾನದ ಈ ನಡವಳಿಕೆಯು ವಿಶಿಷ್ಟವಾಗುತ್ತದೆ. ಈ ವಿದ್ಯಮಾನವನ್ನು ಎದುರಿಸಲು, ಇದನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಅದರ ಸಾರವು ತುಂಬಾ ಸರಳವಾಗಿದೆ. ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ಎರಡು ಹಂತಗಳನ್ನು ಮಾಡಿದ ನಂತರ ಮತ್ತು ಮೂರು ಅಂಕಗಳನ್ನು ಪಡೆದ ನಂತರ, ಕಂದರದ ಕೆಳಭಾಗದಲ್ಲಿ ಮೊದಲ ಮತ್ತು ಮೂರನೇ ಬಿಂದುಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ವೆಕ್ಟರ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಮೂರನೇ ಹಂತವನ್ನು ತೆಗೆದುಕೊಳ್ಳಬೇಕು.
ಕ್ವಾಡ್ರಾಟಿಕ್ಗೆ ಹತ್ತಿರವಿರುವ ಕಾರ್ಯಗಳಿಗಾಗಿ, ಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವು ಪರಿಣಾಮಕಾರಿಯಾಗಿದೆ.
ಕೃತಕ ನರಗಳ ಜಾಲಗಳಲ್ಲಿ ಅಪ್ಲಿಕೇಶನ್[ | ]
ಗ್ರೇಡಿಯಂಟ್ ಡಿಸೆಂಟ್ ವಿಧಾನ, ಕೆಲವು ಮಾರ್ಪಾಡುಗಳೊಂದಿಗೆ, ಪರ್ಸೆಪ್ಟ್ರಾನ್ ತರಬೇತಿಗಾಗಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು ಕೃತಕ ನರ ಜಾಲಗಳ ಸಿದ್ಧಾಂತದಲ್ಲಿ ಬ್ಯಾಕ್ಪ್ರೊಪಗೇಷನ್ ವಿಧಾನ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಪರ್ಸೆಪ್ಟ್ರಾನ್-ಮಾದರಿಯ ನರಮಂಡಲವನ್ನು ತರಬೇತಿ ಮಾಡುವಾಗ, ಕಡಿಮೆಗೊಳಿಸಲು ನೆಟ್ವರ್ಕ್ನ ತೂಕದ ಗುಣಾಂಕಗಳನ್ನು ಬದಲಾಯಿಸುವುದು ಅವಶ್ಯಕ ಸರಾಸರಿ ದೋಷತರಬೇತಿ ಇನ್ಪುಟ್ ಡೇಟಾದ ಅನುಕ್ರಮವನ್ನು ಇನ್ಪುಟ್ಗೆ ಸರಬರಾಜು ಮಾಡಿದಾಗ ನರಮಂಡಲದ ಔಟ್ಪುಟ್ನಲ್ಲಿ. ಔಪಚಾರಿಕವಾಗಿ, ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ಕೇವಲ ಒಂದು ಹೆಜ್ಜೆ ತೆಗೆದುಕೊಳ್ಳಲು (ನೆಟ್ವರ್ಕ್ ಪ್ಯಾರಾಮೀಟರ್ಗಳಲ್ಲಿ ಕೇವಲ ಒಂದು ಬದಲಾವಣೆಯನ್ನು ಮಾಡಿ), ನೆಟ್ವರ್ಕ್ ಇನ್ಪುಟ್ಗೆ ಸಂಪೂರ್ಣ ತರಬೇತಿ ಡೇಟಾವನ್ನು ಅನುಕ್ರಮವಾಗಿ ಸಲ್ಲಿಸುವುದು ಅವಶ್ಯಕ, ಪ್ರತಿ ವಸ್ತುವಿನ ದೋಷವನ್ನು ಲೆಕ್ಕಹಾಕಿ ತರಬೇತಿ ಡೇಟಾ ಮತ್ತು ನೆಟ್ವರ್ಕ್ ಗುಣಾಂಕಗಳ ಅಗತ್ಯ ತಿದ್ದುಪಡಿಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಿ (ಆದರೆ ಈ ತಿದ್ದುಪಡಿಯನ್ನು ಮಾಡಬೇಡಿ), ಮತ್ತು ಎಲ್ಲಾ ಡೇಟಾವನ್ನು ಸಲ್ಲಿಸಿದ ನಂತರ, ಪ್ರತಿ ನೆಟ್ವರ್ಕ್ ಗುಣಾಂಕದ (ಗ್ರೇಡಿಯಂಟ್ಗಳ ಮೊತ್ತ) ತಿದ್ದುಪಡಿಯಲ್ಲಿ ಮೊತ್ತವನ್ನು ಲೆಕ್ಕಹಾಕಿ ಮತ್ತು “ಒಂದು ಹೆಜ್ಜೆ” ಗುಣಾಂಕಗಳನ್ನು ಸರಿಪಡಿಸಿ. . ನಿಸ್ಸಂಶಯವಾಗಿ, ತರಬೇತಿ ಡೇಟಾದ ದೊಡ್ಡ ಗುಂಪಿನೊಂದಿಗೆ, ಅಲ್ಗಾರಿದಮ್ ಅತ್ಯಂತ ನಿಧಾನವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಆದ್ದರಿಂದ ಪ್ರಾಯೋಗಿಕವಾಗಿ, ಪ್ರತಿ ತರಬೇತಿ ಅಂಶದ ನಂತರ ನೆಟ್ವರ್ಕ್ ಗುಣಾಂಕಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ, ಅಲ್ಲಿ ಗ್ರೇಡಿಯಂಟ್ ಮೌಲ್ಯವನ್ನು ವೆಚ್ಚ ಕಾರ್ಯದ ಗ್ರೇಡಿಯಂಟ್ನಿಂದ ಅಂದಾಜು ಮಾಡಲಾಗುತ್ತದೆ, ಕೇವಲ ಒಂದು ತರಬೇತಿಯ ಮೇಲೆ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ. ಅಂಶ. ಈ ವಿಧಾನವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಸ್ಟೋಕಾಸ್ಟಿಕ್ ಗ್ರೇಡಿಯಂಟ್ ಅವರೋಹಣ ಅಥವಾ ಕಾರ್ಯಾಚರಣೆಯ ಗ್ರೇಡಿಯಂಟ್ ಅವರೋಹಣ . ಸ್ಟೊಕಾಸ್ಟಿಕ್ ಗ್ರೇಡಿಯಂಟ್ ಡಿಸೆಂಟ್ ಎಂಬುದು ಸ್ಟೊಕಾಸ್ಟಿಕ್ ಅಂದಾಜಿನ ಒಂದು ರೂಪವಾಗಿದೆ. ಸ್ಟೋಕಾಸ್ಟಿಕ್ ಅಂದಾಜುಗಳ ಸಿದ್ಧಾಂತವು ಸ್ಟೋಕಾಸ್ಟಿಕ್ ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ವಿಧಾನದ ಒಮ್ಮುಖಕ್ಕೆ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಲಿಂಕ್ಗಳು [ | ]
- ಜೆ. ಮ್ಯಾಥ್ಯೂಸ್ಕಡಿದಾದ ಮೂಲದ ಅಥವಾ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಕ್ಕಾಗಿ ಮಾಡ್ಯೂಲ್. (ಲಭ್ಯವಿಲ್ಲ ಲಿಂಕ್)
ಸಾಹಿತ್ಯ [ | ]
- ಅಕುಲಿಚ್ I. L.ಉದಾಹರಣೆಗಳು ಮತ್ತು ಸಮಸ್ಯೆಗಳಲ್ಲಿ ಗಣಿತದ ಪ್ರೋಗ್ರಾಮಿಂಗ್. - ಎಂ.: ಹೈಯರ್ ಸ್ಕೂಲ್, 1986. - ಪಿ. 298-310.
- ಗಿಲ್ ಎಫ್., ಮುರ್ರೆ ಡಬ್ಲ್ಯೂ., ರೈಟ್ ಎಂ.ಪ್ರಾಯೋಗಿಕ ಆಪ್ಟಿಮೈಸೇಶನ್ = ಪ್ರಾಯೋಗಿಕ ಆಪ್ಟಿಮೈಸೇಶನ್. - ಎಂ.: ಮಿರ್, 1985.
- ಕೊರ್ಶುನೋವ್ ಎಮ್., ಕೊರ್ಶುನೋವ್ ಎಮ್.ಸೈಬರ್ನೆಟಿಕ್ಸ್ನ ಗಣಿತದ ಅಡಿಪಾಯ. - ಎಂ.: ಎನರ್ಗೋಟೊಮಿಜ್ಡಾಟ್, 1972.
- ಮ್ಯಾಕ್ಸಿಮೋವ್ ಯು., ಫಿಲಿಪೋವ್ಸ್ಕಯಾ ಇ.ಎ.ರೇಖಾತ್ಮಕವಲ್ಲದ ಪ್ರೋಗ್ರಾಮಿಂಗ್ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಅಲ್ಗಾರಿದಮ್ಗಳು. - ಎಂ.: MEPhI, 1982.
- ಮ್ಯಾಕ್ಸಿಮೊವ್ ಯು.ಲೀನಿಯರ್ ಮತ್ತು ಡಿಸ್ಕ್ರೀಟ್ ಪ್ರೋಗ್ರಾಮಿಂಗ್ಗಾಗಿ ಅಲ್ಗಾರಿದಮ್ಗಳು. - ಎಂ.: MEPhI, 1980.
- ಕಾರ್ನ್ ಜಿ., ಕಾರ್ನ್ ಟಿ.ವಿಜ್ಞಾನಿಗಳು ಮತ್ತು ಎಂಜಿನಿಯರ್ಗಳಿಗೆ ಗಣಿತದ ಕೈಪಿಡಿ. - ಎಂ.: ನೌಕಾ, 1970. - ಪಿ. 575-576.
- S. ಗೊರೊಡೆಟ್ಸ್ಕಿ, V. A. ಗ್ರಿಶಾಗಿನ್.ರೇಖಾತ್ಮಕವಲ್ಲದ ಪ್ರೋಗ್ರಾಮಿಂಗ್ ಮತ್ತು ಮಲ್ಟಿಎಕ್ಸ್ಟ್ರೀಮಲ್ ಆಪ್ಟಿಮೈಸೇಶನ್. - ನಿಜ್ನಿ ನವ್ಗೊರೊಡ್: ನಿಜ್ನಿ ನವ್ಗೊರೊಡ್ ವಿಶ್ವವಿದ್ಯಾಲಯದ ಪಬ್ಲಿಷಿಂಗ್ ಹೌಸ್, 2007. - ಪುಟಗಳು 357-363.
ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನವು ವೇರಿಯಬಲ್ ಹಂತವನ್ನು ಹೊಂದಿರುವ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವಾಗಿದೆ. ಪ್ರತಿ ಪುನರಾವರ್ತನೆಯಲ್ಲಿ, ಹಂತದ ಗಾತ್ರ k ಅನ್ನು ಅವರೋಹಣ ದಿಕ್ಕಿನಲ್ಲಿ ಕನಿಷ್ಠ ಕಾರ್ಯದ f(x) ಸ್ಥಿತಿಯಿಂದ ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ, ಅಂದರೆ.
ಈ ಸ್ಥಿತಿ ಎಂದರೆ f (x) ಕಾರ್ಯದ ಮೌಲ್ಯವು ಕಡಿಮೆಯಾಗುವವರೆಗೆ ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ ಉದ್ದಕ್ಕೂ ಚಲನೆ ಸಂಭವಿಸುತ್ತದೆ. ಗಣಿತದ ದೃಷ್ಟಿಕೋನದಿಂದ, ಪ್ರತಿ ಪುನರಾವರ್ತನೆಯಲ್ಲಿ ಕಾರ್ಯದ ಮೂಲಕ ಒಂದು ಆಯಾಮದ ಕನಿಷ್ಠೀಕರಣದ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವುದು ಅವಶ್ಯಕ
()=f (x (k) -f (x (k)))
ಇದಕ್ಕಾಗಿ ಸುವರ್ಣ ಅನುಪಾತ ವಿಧಾನವನ್ನು ಬಳಸೋಣ.
ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಅಲ್ಗಾರಿದಮ್ ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ.
ಆರಂಭಿಕ ಬಿಂದು x (0) ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ.
ಪಾಯಿಂಟ್ x (k) ನಲ್ಲಿ , k = 0, 1, 2, ..., ಗ್ರೇಡಿಯಂಟ್ ಮೌಲ್ಯ f (x (k)) ಅನ್ನು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ.
ಕಾರ್ಯವನ್ನು ಬಳಸಿಕೊಂಡು ಒಂದು ಆಯಾಮದ ಕಡಿಮೆಗೊಳಿಸುವಿಕೆಯಿಂದ ಹಂತದ ಗಾತ್ರ k ಅನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ
()=f (x (k) -f (x (k))).
ಪಾಯಿಂಟ್ x (k) ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
x i (k+1) = x i (k) - k f i (x (k)), i=1, …, n.
ಪುನರಾವರ್ತಿತ ಪ್ರಕ್ರಿಯೆಯನ್ನು ನಿಲ್ಲಿಸುವ ಸ್ಥಿತಿಯನ್ನು ಪರಿಶೀಲಿಸಲಾಗಿದೆ:
||f (x (k +1))|| .
ಅದು ಈಡೇರಿದರೆ ಲೆಕ್ಕಾಚಾರಗಳು ನಿಲ್ಲುತ್ತವೆ. ಇಲ್ಲದಿದ್ದರೆ, ನಾವು ಹಂತ 1 ಕ್ಕೆ ಮುಂದುವರಿಯುತ್ತೇವೆ. ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಜ್ಯಾಮಿತೀಯ ವ್ಯಾಖ್ಯಾನವನ್ನು ಅಂಜೂರದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗಿದೆ. 1.

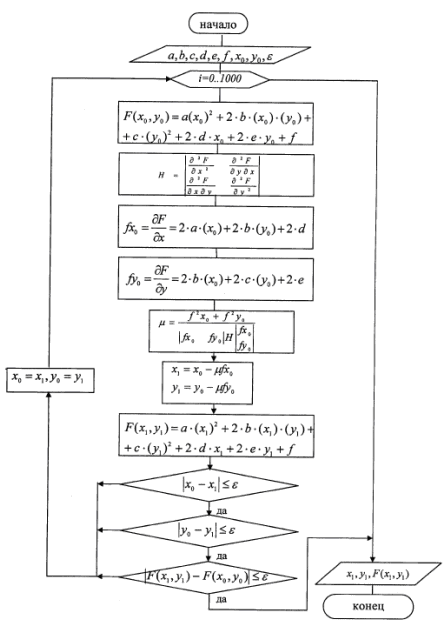
ಅಕ್ಕಿ. 2.1. ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರ.
ಪ್ರೋಗ್ರಾಂನಲ್ಲಿ ವಿಧಾನದ ಅನುಷ್ಠಾನ:
ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನ.

ಅಕ್ಕಿ. 2.2 ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಅನುಷ್ಠಾನ.
ತೀರ್ಮಾನ: ನಮ್ಮ ಸಂದರ್ಭದಲ್ಲಿ, ವಿಧಾನವು 7 ಪುನರಾವರ್ತನೆಗಳಲ್ಲಿ ಒಮ್ಮುಖವಾಗಿದೆ. ಪಾಯಿಂಟ್ A7 (0.6641; -1.3313) ಒಂದು ವಿಪರೀತ ಬಿಂದುವಾಗಿದೆ. ಸಂಯೋಜಿತ ದಿಕ್ಕುಗಳ ವಿಧಾನ. ಕ್ವಾಡ್ರಾಟಿಕ್ ಕಾರ್ಯಗಳಿಗಾಗಿ, ನೀವು ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವನ್ನು ರಚಿಸಬಹುದು, ಇದರಲ್ಲಿ ಒಮ್ಮುಖ ಸಮಯವು ಸೀಮಿತವಾಗಿರುತ್ತದೆ ಮತ್ತು ಅಸ್ಥಿರ ಸಂಖ್ಯೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ n.
ನಾವು ನಿರ್ದಿಷ್ಟ ದಿಕ್ಕನ್ನು ಕರೆಯೋಣ ಮತ್ತು ಕೆಲವು ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಹೆಸ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ H ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸಂಯೋಗ ಮಾಡೋಣ:
ನಂತರ ಅಂದರೆ H ಘಟಕಕ್ಕೆ, ಸಂಯೋಜಿತ ದಿಕ್ಕು ಎಂದರೆ ಅವುಗಳ ಲಂಬ. ಸಾಮಾನ್ಯ ಸಂದರ್ಭದಲ್ಲಿ, H ಕ್ಷುಲ್ಲಕವಲ್ಲ. IN ಸಾಮಾನ್ಯ ಪ್ರಕರಣಸಂಯೋಗವು ಹೆಸ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅನ್ನು ವೆಕ್ಟರ್ಗೆ ಅನ್ವಯಿಸುತ್ತದೆ - ಇದರರ್ಥ ಈ ವೆಕ್ಟರ್ ಅನ್ನು ಕೆಲವು ಕೋನದಿಂದ ತಿರುಗಿಸುವುದು, ವಿಸ್ತರಿಸುವುದು ಅಥವಾ ಸಂಕುಚಿತಗೊಳಿಸುವುದು.

ಮತ್ತು ಈಗ ವೆಕ್ಟರ್ ಆರ್ಥೋಗೋನಲ್ ಆಗಿದೆ, ಅಂದರೆ ಸಂಯೋಗವು ವೆಕ್ಟರ್ನ ಆರ್ಥೋಗೋನಾಲಿಟಿ ಅಲ್ಲ, ಆದರೆ ತಿರುಗುವ ವೆಕ್ಟರ್ನ ಆರ್ಥೋಗೋನಾಲಿಟಿ.e.i.


ಅಕ್ಕಿ. 2.3 ಸಂಯೋಜಿತ ದಿಕ್ಕುಗಳ ವಿಧಾನದ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರ.
ಪ್ರೋಗ್ರಾಂನಲ್ಲಿ ವಿಧಾನದ ಅನುಷ್ಠಾನ: ಸಂಯೋಜಿತ ನಿರ್ದೇಶನಗಳ ವಿಧಾನ.

ಅಕ್ಕಿ. 2.4 ಸಂಯೋಜಿತ ದಿಕ್ಕುಗಳ ವಿಧಾನದ ಅನುಷ್ಠಾನ.

ಅಕ್ಕಿ. 2.5 ಸಂಯೋಜಿತ ದಿಕ್ಕುಗಳ ವಿಧಾನದ ಗ್ರಾಫ್.
ತೀರ್ಮಾನ: ಪಾಯಿಂಟ್ A3 (0.6666; -1.3333) 3 ಪುನರಾವರ್ತನೆಗಳಲ್ಲಿ ಕಂಡುಬಂದಿದೆ ಮತ್ತು ಇದು ಒಂದು ವಿಪರೀತ ಬಿಂದುವಾಗಿದೆ.
3. ನಿರ್ಬಂಧಗಳ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ ಕಾರ್ಯದ ಕನಿಷ್ಠ ಮತ್ತು ಗರಿಷ್ಠ ಮೌಲ್ಯವನ್ನು ನಿರ್ಧರಿಸುವ ವಿಧಾನಗಳ ವಿಶ್ಲೇಷಣೆ
ಅದನ್ನು ನಿಮಗೆ ನೆನಪಿಸೋಣ ಸಾಮಾನ್ಯ ಕಾರ್ಯಷರತ್ತುಬದ್ಧ ಆಪ್ಟಿಮೈಸೇಶನ್ ಈ ರೀತಿ ಕಾಣುತ್ತದೆ
f(x) ® ನಿಮಿಷ, x О W,
ಇಲ್ಲಿ W ಎಂಬುದು R m ನ ಸರಿಯಾದ ಉಪವಿಭಾಗವಾಗಿದೆ. ಸಮಾನತೆ-ರೀತಿಯ ನಿರ್ಬಂಧಗಳೊಂದಿಗೆ ಸಮಸ್ಯೆಗಳ ಉಪವರ್ಗವು ಸೆಟ್ ಅನ್ನು ರೂಪದ ನಿರ್ಬಂಧಗಳಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ ಎಂಬ ಅಂಶದಿಂದ ಪ್ರತ್ಯೇಕಿಸಲಾಗಿದೆ
f i (x) = 0, ಅಲ್ಲಿ f i: R m ®R (i = 1, …, k).
ಹೀಗಾಗಿ,W = (x О R m: f i (x) = 0, i = 1, ..., k).
ಎಫ್ ಕಾರ್ಯಕ್ಕಾಗಿ ಸೂಚ್ಯಂಕ "0" ಅನ್ನು ಬರೆಯಲು ನಮಗೆ ಅನುಕೂಲಕರವಾಗಿರುತ್ತದೆ. ಹೀಗಾಗಿ, ಸಮಾನತೆಯ ಪ್ರಕಾರದ ನಿರ್ಬಂಧಗಳೊಂದಿಗೆ ಆಪ್ಟಿಮೈಸೇಶನ್ ಸಮಸ್ಯೆಯನ್ನು ಹೀಗೆ ಬರೆಯಲಾಗಿದೆ
f 0 (x) ® ನಿಮಿಷ, (3.1)
f i (x) = 0, i = 1, ..., k. (3.2)
ನಾವು ಈಗ R k ನಲ್ಲಿ ಮೌಲ್ಯಗಳೊಂದಿಗೆ R m ನಲ್ಲಿ f a ಫಂಕ್ಷನ್ ಅನ್ನು ಸೂಚಿಸಿದರೆ, ಅದರ ನಿರ್ದೇಶಾಂಕ ಸಂಕೇತವು f(x) = (f 1 (x), ..., f k (x)), ನಂತರ ( 3.1)–(3.2) ನಾವು ಅದನ್ನು ರೂಪದಲ್ಲಿ ಬರೆಯಬಹುದು
f 0 (x) ® ನಿಮಿಷ, f(x) = Q.
ಜ್ಯಾಮಿತೀಯವಾಗಿ, ಸಮಾನತೆಯ ಪ್ರಕಾರದ ನಿರ್ಬಂಧಗಳೊಂದಿಗಿನ ಸಮಸ್ಯೆಯು ಮ್ಯಾನಿಫೋಲ್ಡ್ (Fig. 3.1 ನೋಡಿ) ಎಫ್ 0 ಫಂಕ್ಷನ್ನ ಗ್ರಾಫ್ನ ಕಡಿಮೆ ಬಿಂದುವನ್ನು ಕಂಡುಹಿಡಿಯುವ ಸಮಸ್ಯೆಯಾಗಿದೆ.

ಎಲ್ಲಾ ನಿರ್ಬಂಧಗಳನ್ನು ಪೂರೈಸುವ ಅಂಕಗಳನ್ನು (ಅಂದರೆ, ಸೆಟ್ನಲ್ಲಿನ ಅಂಕಗಳು ) ಸಾಮಾನ್ಯವಾಗಿ ಸ್ವೀಕಾರಾರ್ಹ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಒಪ್ಪಿಕೊಳ್ಳಬಹುದಾದ ಬಿಂದು x* ಅನ್ನು f i (x) = 0, i = 1, ..., k (ಅಥವಾ ಸಮಸ್ಯೆಗೆ ಪರಿಹಾರ (3.1)–(3.2)) ಅಡಿಯಲ್ಲಿ f 0 ಕಾರ್ಯದ ಷರತ್ತುಬದ್ಧ ಕನಿಷ್ಠ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಎಲ್ಲಾ ಸ್ವೀಕಾರಾರ್ಹ ಬಿಂದುಗಳಿಗೆ x f 0 (x *) f 0 (x). (3.3)
(3.3) ಕೆಲವು ನೆರೆಹೊರೆಯಲ್ಲಿ ಇರುವ ಸ್ವೀಕಾರಾರ್ಹ x ಗಾಗಿ ಮಾತ್ರ ತೃಪ್ತವಾಗಿದ್ದರೆ V x * ಪಾಯಿಂಟ್ x *, ನಂತರ ನಾವು ಸ್ಥಳೀಯ ಷರತ್ತುಬದ್ಧ ಕನಿಷ್ಠವನ್ನು ಕುರಿತು ಮಾತನಾಡುತ್ತೇವೆ. ಷರತ್ತುಬದ್ಧ ಕಟ್ಟುನಿಟ್ಟಾದ ಸ್ಥಳೀಯ ಮತ್ತು ಜಾಗತಿಕ ಕನಿಷ್ಠ ಪರಿಕಲ್ಪನೆಗಳನ್ನು ನೈಸರ್ಗಿಕ ರೀತಿಯಲ್ಲಿ ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ.
ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನದ ಈ ಆವೃತ್ತಿಯಲ್ಲಿ, ಕಡಿಮೆಗೊಳಿಸುವ ಅನುಕ್ರಮವನ್ನು (X k) ಸಹ ನಿಯಮದ ಪ್ರಕಾರ (2.22) ನಿರ್ಮಿಸಲಾಗಿದೆ. ಆದಾಗ್ಯೂ, ಸಹಾಯಕ ಏಕ-ಆಯಾಮದ ಮಿನಿಮೈಸೇಶನ್ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವ ಪರಿಣಾಮವಾಗಿ ಹಂತ ಗಾತ್ರ a k ಕಂಡುಬರುತ್ತದೆ
ನಿಮಿಷ(j k (a) | a>0 ), (2.27)
ಅಲ್ಲಿ j k (a)=f(X k - a· (X k)). ಹೀಗಾಗಿ, ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಪ್ರತಿ ಪುನರಾವರ್ತನೆಯಲ್ಲಿ ![]() ಒಂದು ಸಮಗ್ರ ಮೂಲವನ್ನು ನಡೆಸಲಾಗುತ್ತದೆ. ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಲು (2.27), ನೀವು ವಿಭಾಗ 1 ರಲ್ಲಿ ವಿವರಿಸಿದ ಒಂದು ಆಯಾಮದ ಹುಡುಕಾಟ ವಿಧಾನಗಳಲ್ಲಿ ಒಂದನ್ನು ಬಳಸಬಹುದು, ಉದಾಹರಣೆಗೆ, ಬಿಟ್ವೈಸ್ ಹುಡುಕಾಟ ವಿಧಾನ ಅಥವಾ ಗೋಲ್ಡನ್ ವಿಭಾಗದ ವಿಧಾನ.
ಒಂದು ಸಮಗ್ರ ಮೂಲವನ್ನು ನಡೆಸಲಾಗುತ್ತದೆ. ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಲು (2.27), ನೀವು ವಿಭಾಗ 1 ರಲ್ಲಿ ವಿವರಿಸಿದ ಒಂದು ಆಯಾಮದ ಹುಡುಕಾಟ ವಿಧಾನಗಳಲ್ಲಿ ಒಂದನ್ನು ಬಳಸಬಹುದು, ಉದಾಹರಣೆಗೆ, ಬಿಟ್ವೈಸ್ ಹುಡುಕಾಟ ವಿಧಾನ ಅಥವಾ ಗೋಲ್ಡನ್ ವಿಭಾಗದ ವಿಧಾನ.
ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಅಲ್ಗಾರಿದಮ್ ಅನ್ನು ನಾವು ವಿವರಿಸೋಣ.
ಹಂತ 0.ನಿಖರತೆ ನಿಯತಾಂಕವನ್ನು ಹೊಂದಿಸಿ e>0, ಆಯ್ಕೆ X 0 ОE n , ಸೆಟ್ k=0.
ಹಂತ 1.(X k) ಅನ್ನು ಹುಡುಕಿ ಮತ್ತು ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ನಿಖರತೆಯನ್ನು ಸಾಧಿಸಲು ಸ್ಥಿತಿಯನ್ನು ಪರಿಶೀಲಿಸಿ || (x k) ||£ ಇ. ಅದು ತೃಪ್ತವಾಗಿದ್ದರೆ, ನಂತರ ಹಂತ 3 ಕ್ಕೆ ಹೋಗಿ, ಇಲ್ಲದಿದ್ದರೆ - ಹಂತ 2 ಕ್ಕೆ.
ಹಂತ 2.ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಿ (2.27), ಅಂದರೆ. ಕೆ ಅನ್ನು ಹುಡುಕಿ. ಮುಂದಿನ ಹಂತವನ್ನು ಹುಡುಕಿ, k=k+1 ಅನ್ನು ಹಾಕಿ ಮತ್ತು ಹಂತ 1 ಕ್ಕೆ ಹೋಗಿ.
ಹಂತ 3 X * = X k, f * = f (X k) ಅನ್ನು ಹಾಕುವ ಮೂಲಕ ಲೆಕ್ಕಾಚಾರಗಳನ್ನು ಪೂರ್ಣಗೊಳಿಸಿ.
ಕಾರ್ಯವನ್ನು ಕಡಿಮೆ ಮಾಡಿ
f(x)=x 1 2 +4x 2 2 -6x 1 -8x 2 +13; (2.28)
ಮೊದಲು ಸಮಸ್ಯೆ ಬಗೆಹರಿಸೋಣ ಶ್ರೇಷ್ಠವಿಧಾನ. ಪ್ರತಿನಿಧಿಸುವ ಸಮೀಕರಣಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ನಾವು ಬರೆಯೋಣ ಅಗತ್ಯ ಪರಿಸ್ಥಿತಿಗಳುಬೇಷರತ್ತಾದ ವಿಪರೀತ

ಅದನ್ನು ಪರಿಹರಿಸಿದ ನಂತರ, ನಾವು X*=(3;1) ಸ್ಥಾಯಿ ಬಿಂದುವನ್ನು ಪಡೆಯುತ್ತೇವೆ. ಮುಂದೆ, ಮರಣದಂಡನೆಯನ್ನು ಪರಿಶೀಲಿಸೋಣ ಸಾಕಷ್ಟು ಸ್ಥಿತಿ, ಇದಕ್ಕಾಗಿ ನಾವು ಎರಡನೇ ಉತ್ಪನ್ನಗಳ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ
ಏಕೆಂದರೆ, ಸಿಲ್ವೆಸ್ಟರ್ ಮಾನದಂಡದ ಪ್ರಕಾರ, ಈ ಮ್ಯಾಟ್ರಿಕ್ಸ್ "ಗೆ ಧನಾತ್ಮಕ ನಿಶ್ಚಿತವಾಗಿದೆ, ನಂತರ ಕಂಡುಬಂದ ಪಾಯಿಂಟ್ X* ಎಂಬುದು ಫಂಕ್ಷನ್ನ ಕನಿಷ್ಠ ಬಿಂದುವಾಗಿದೆ f(X). ಕನಿಷ್ಠ ಮೌಲ್ಯ f *=f(X*)=0. ಇದು ಸಮಸ್ಯೆಯ ನಿಖರವಾದ ಪರಿಹಾರವಾಗಿದೆ (11).
ವಿಧಾನದ ಒಂದು ಪುನರಾವರ್ತನೆಯನ್ನು ಮಾಡೋಣ ಗ್ರೇಡಿಯಂಟ್ ಅವರೋಹಣಫಾರ್ (2.28). ಆರಂಭಿಕ ಹಂತವನ್ನು ಆಯ್ಕೆ ಮಾಡೋಣ X 0 =(1;0), ಆರಂಭಿಕ ಹಂತ a=1 ಮತ್ತು ಪ್ಯಾರಾಮೀಟರ್ l=0.5 ಅನ್ನು ಹೊಂದಿಸಿ. ನಾವು f(X 0)=8 ಅನ್ನು ಲೆಕ್ಕ ಹಾಕೋಣ.
ಪಾಯಿಂಟ್ X 0 ನಲ್ಲಿ f(X) ಫಂಕ್ಷನ್ನ ಗ್ರೇಡಿಯಂಟ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯೋಣ
(X 0)= = (2.29)
ಅದರ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವ ಮೂಲಕ ಹೊಸ ಬಿಂದು X=X 0 -a· (X 0) ಅನ್ನು ವ್ಯಾಖ್ಯಾನಿಸೋಣ
x 1 = 
x 2 =  (2.30)
(2.30)
ನಾವು f(X)= f(X 0 -a· (X 0))=200 ಅನ್ನು ಲೆಕ್ಕ ಹಾಕೋಣ. f(X)>f(X 0), ನಾವು ಹಂತವನ್ನು ವಿಭಜಿಸುತ್ತೇವೆ, a=a·l=1·0.5=0.5 ಎಂದು ಭಾವಿಸುತ್ತೇವೆ. ನಾವು ಸೂತ್ರಗಳನ್ನು (2.30) x 1 =1+4a=3 ಬಳಸಿ ಮತ್ತೆ ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತೇವೆ; x 2 =8a=4 ಮತ್ತು f(X)=39 ಮೌಲ್ಯವನ್ನು ಕಂಡುಹಿಡಿಯಿರಿ. f(X)>f(X 0) ಮತ್ತೆ, ನಾವು ಹಂತ ಗಾತ್ರವನ್ನು ಮತ್ತಷ್ಟು ಕಡಿಮೆ ಮಾಡುತ್ತೇವೆ, a=a·l=0.5·0.5=0.25 ಹೊಂದಿಸುತ್ತೇವೆ. ನಾವು x 1 =1+4·0.25=2 ನಿರ್ದೇಶಾಂಕಗಳೊಂದಿಗೆ ಹೊಸ ಬಿಂದುವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತೇವೆ; x 2 =8·0.25=2 ಮತ್ತು ಈ ಹಂತದಲ್ಲಿ ಫಂಕ್ಷನ್ನ ಮೌಲ್ಯ f(X)=5. ಎಫ್(ಎಕ್ಸ್) ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಸ್ಥಿತಿಯಿಂದ ವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ಒಂದು ಪುನರಾವರ್ತನೆಯನ್ನು ಮಾಡೋಣ ಕಡಿದಾದ ಇಳಿಜಾರು(2.28) ಗೆ ಅದೇ ಆರಂಭಿಕ ಬಿಂದು X 0 =(1;0). ಈಗಾಗಲೇ ಕಂಡುಬರುವ ಗ್ರೇಡಿಯಂಟ್ (2.29) ಬಳಸಿ, ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ X= X 0 -a· (X 0) ಮತ್ತು ಕಾರ್ಯವನ್ನು ನಿರ್ಮಿಸಿ j 0 (a)=f(X 0 -a· (X 0))=(4a-2) 2 +4(8a-1) 2. ಅಗತ್ಯ ಸ್ಥಿತಿಯನ್ನು ಬಳಸಿಕೊಂಡು ಅದನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ j 0 ¢(a)=8·(4a - 2)+64·(8a - 1)=0 0 =5/34 ಹಂತದ ಗಾತ್ರದ ಅತ್ಯುತ್ತಮ ಮೌಲ್ಯವನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ. ಕಡಿಮೆಗೊಳಿಸುವ ಅನುಕ್ರಮದ ಬಿಂದುವನ್ನು ನಿರ್ಧರಿಸುವುದು X 1 = X 0 -a 0 · (X 0) ಬಿಂದುವಿನಲ್ಲಿ ಡಿಫರೆನ್ಶಿಯೇಬಲ್ ಫಂಕ್ಷನ್ f(x) ನ ಗ್ರೇಡಿಯಂಟ್ Xಎಂದು ಕರೆದರು ಎನ್- ಆಯಾಮದ ವೆಕ್ಟರ್ f(x)
, ಇದರ ಘಟಕಗಳು ಕಾರ್ಯದ ಭಾಗಶಃ ಉತ್ಪನ್ನಗಳಾಗಿವೆ f(x),ಹಂತದಲ್ಲಿ ಲೆಕ್ಕಹಾಕಲಾಗಿದೆ X, ಅಂದರೆ f"(x ) = (df(x)/dh 1 ,…, df(x)/ಡಿಎಕ್ಸ್ ಎನ್) ಟಿ ಈ ವೆಕ್ಟರ್ ಪಾಯಿಂಟ್ ಮೂಲಕ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ X, ಮತ್ತು ಕಾರ್ಯದ ಮಟ್ಟದ ಮೇಲ್ಮೈಗೆ ಸ್ಪರ್ಶಕ f(x),ಒಂದು ಬಿಂದುವಿನ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ X.ಅಂತಹ ಮೇಲ್ಮೈಯ ಪ್ರತಿ ಹಂತದಲ್ಲಿ ಕಾರ್ಯ f(x)ಅದೇ ಮೌಲ್ಯವನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ. ಕಾರ್ಯವನ್ನು ವಿವಿಧ ಸ್ಥಿರ ಮೌಲ್ಯಗಳಿಗೆ ಸಮೀಕರಿಸುವುದು C 0 , C 1 , ..., ನಾವು ಅದರ ಟೋಪೋಲಜಿಯನ್ನು ನಿರೂಪಿಸುವ ಮೇಲ್ಮೈಗಳ ಸರಣಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ (ಚಿತ್ರ 2.8). ಗ್ರೇಡಿಯಂಟ್ ವೆಕ್ಟರ್ ಅನ್ನು ನಿರ್ದಿಷ್ಟ ಹಂತದಲ್ಲಿ ಕಾರ್ಯದಲ್ಲಿ ವೇಗವಾಗಿ ಹೆಚ್ಚಿಸುವ ಕಡೆಗೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಗ್ರೇಡಿಯಂಟ್ ವಿರುದ್ಧ ವೆಕ್ಟರ್ (-f'(x))
, ಎಂದು ಕರೆಯುತ್ತಾರೆ ವಿರೋಧಿ ಗ್ರೇಡಿಯಂಟ್ಮತ್ತು ಕಾರ್ಯದ ವೇಗದ ಇಳಿಕೆಯ ಕಡೆಗೆ ನಿರ್ದೇಶಿಸಲಾಗಿದೆ. ಕನಿಷ್ಠ ಹಂತದಲ್ಲಿ, ಕಾರ್ಯದ ಗ್ರೇಡಿಯಂಟ್ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಗ್ರೇಡಿಯಂಟ್ ಮತ್ತು ಮಿನಿಮೈಸೇಶನ್ ವಿಧಾನಗಳು ಎಂದೂ ಕರೆಯಲ್ಪಡುವ ಮೊದಲ-ಕ್ರಮದ ವಿಧಾನಗಳು ಇಳಿಜಾರುಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಆಧರಿಸಿವೆ. ಸಾಮಾನ್ಯ ಸಂದರ್ಭದಲ್ಲಿ ಈ ವಿಧಾನಗಳನ್ನು ಬಳಸುವುದು ಕಾರ್ಯದ ಸ್ಥಳೀಯ ಕನಿಷ್ಠ ಬಿಂದುವನ್ನು ನಿರ್ಧರಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ನಿಸ್ಸಂಶಯವಾಗಿ, ಯಾವುದೇ ಹೆಚ್ಚುವರಿ ಮಾಹಿತಿ ಇಲ್ಲದಿದ್ದರೆ, ನಂತರ ಆರಂಭಿಕ ಹಂತದಿಂದ Xಬಿಂದುವಿಗೆ ಹೋಗುವುದು ಸಮಂಜಸವಾಗಿದೆ X, ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ ದಿಕ್ಕಿನಲ್ಲಿ ಸುಳ್ಳು - ಕ್ರಿಯೆಯ ವೇಗವಾದ ಇಳಿಕೆ. ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು[ಆರ್ಕೆ ] ವಿರೋಧಿ ಗ್ರೇಡಿಯಂಟ್ - f'(x )
[ಕೆ] X[ಆರ್ಹಂತದಲ್ಲಿ ], ನಾವು ರೂಪದ ಪುನರಾವರ್ತಿತ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪಡೆಯುತ್ತೇವೆ X[ 1] = k+[ಆರ್]-a k f"(x f'(x )
,
ಮತ್ತು ಕೆ > 0; ಆರ್=0, 1, 2, ... ನಿರ್ದೇಶಾಂಕ ರೂಪದಲ್ಲಿ, ಈ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಬರೆಯಲಾಗಿದೆ: x ನಾನು [ ಆರ್+1]=x i[ಆರ್] - ಒಂದು ಕೆf(x f'(x )
/x i ನಾನು = 1, ..., ಎನ್; ಆರ್= 0, 1, 2,... ಪುನರಾವರ್ತನೆಯ ಪ್ರಕ್ರಿಯೆಯನ್ನು ನಿಲ್ಲಿಸುವ ಮಾನದಂಡವಾಗಿ, ವಾದದ ಸಣ್ಣ ಹೆಚ್ಚಳದ ಸ್ಥಿತಿಯನ್ನು ಪೂರೈಸುವುದು || k+[ಆರ್+l] -x[ಆರ್] || <= e
,
либо выполнение условия малости градиента || f'(x[ಆರ್+l] )
|| <= g
, ಇಲ್ಲಿ e ಮತ್ತು g ಗಳನ್ನು ಸಣ್ಣ ಪ್ರಮಾಣದಲ್ಲಿ ನೀಡಲಾಗಿದೆ. ಸಂಯೋಜಿತ ಮಾನದಂಡವು ಸಹ ಸಾಧ್ಯವಿದೆ, ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಷರತ್ತುಗಳ ಏಕಕಾಲಿಕ ನೆರವೇರಿಕೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುತ್ತದೆ. ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳು ಅವರು ಹಂತದ ಗಾತ್ರವನ್ನು ಆಯ್ಕೆ ಮಾಡುವ ರೀತಿಯಲ್ಲಿ ಪರಸ್ಪರ ಭಿನ್ನವಾಗಿರುತ್ತವೆ ಮತ್ತು ಕೆ. ಸ್ಥಿರ ಹಂತದ ವಿಧಾನದಲ್ಲಿ, ಎಲ್ಲಾ ಪುನರಾವರ್ತನೆಗಳಿಗೆ ನಿರ್ದಿಷ್ಟ ಸ್ಥಿರ ಹಂತದ ಮೌಲ್ಯವನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ. ಸಾಕಷ್ಟು ಸಣ್ಣ ಹೆಜ್ಜೆ ಮತ್ತು ಕೆಕಾರ್ಯವು ಕಡಿಮೆಯಾಗುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸುತ್ತದೆ, ಅಂದರೆ, ಅಸಮಾನತೆ f(x[ ಆರ್+1])
= f(x[ಕೆ] - a k f'(x f'(x ))
< f(x f'(x )
. ಆದಾಗ್ಯೂ, ಇದು ಕನಿಷ್ಟ ಹಂತವನ್ನು ತಲುಪಲು ಸ್ವೀಕಾರಾರ್ಹವಲ್ಲದ ದೊಡ್ಡ ಸಂಖ್ಯೆಯ ಪುನರಾವರ್ತನೆಗಳನ್ನು ಕೈಗೊಳ್ಳುವ ಅಗತ್ಯಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು. ಮತ್ತೊಂದೆಡೆ, ತುಂಬಾ ದೊಡ್ಡ ಹೆಜ್ಜೆಯು ಕ್ರಿಯೆಯಲ್ಲಿ ಅನಿರೀಕ್ಷಿತ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು ಅಥವಾ ಕನಿಷ್ಠ ಬಿಂದುವಿನ (ಸೈಕ್ಲಿಂಗ್) ಸುತ್ತ ಆಂದೋಲನಗಳಿಗೆ ಕಾರಣವಾಗಬಹುದು. ಹಂತದ ಗಾತ್ರವನ್ನು ಆಯ್ಕೆ ಮಾಡಲು ಅಗತ್ಯವಾದ ಮಾಹಿತಿಯನ್ನು ಪಡೆಯುವ ತೊಂದರೆಯಿಂದಾಗಿ, ನಿರಂತರ ಹಂತಗಳನ್ನು ಹೊಂದಿರುವ ವಿಧಾನಗಳನ್ನು ಆಚರಣೆಯಲ್ಲಿ ವಿರಳವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಪುನರಾವರ್ತನೆಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯ ದೃಷ್ಟಿಯಿಂದ ಗ್ರೇಡಿಯಂಟ್ ಹೆಚ್ಚು ಆರ್ಥಿಕವಾಗಿರುತ್ತದೆ. ವೇರಿಯಬಲ್ ಹಂತದ ವಿಧಾನಗಳು,ಯಾವಾಗ, ಲೆಕ್ಕಾಚಾರಗಳ ಫಲಿತಾಂಶಗಳನ್ನು ಅವಲಂಬಿಸಿ, ಹಂತದ ಗಾತ್ರವು ಕೆಲವು ರೀತಿಯಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ. ಆಚರಣೆಯಲ್ಲಿ ಬಳಸಲಾಗುವ ಅಂತಹ ವಿಧಾನಗಳ ರೂಪಾಂತರಗಳನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ. ಪ್ರತಿ ಪುನರಾವರ್ತನೆಯಲ್ಲಿ ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನವನ್ನು ಬಳಸುವಾಗ, ಹಂತದ ಗಾತ್ರ ಮತ್ತು ಕೆಕಾರ್ಯದ ಕನಿಷ್ಠ ಸ್ಥಿತಿಯಿಂದ ಆಯ್ಕೆಮಾಡಲಾಗಿದೆ f(x)ಮೂಲದ ದಿಕ್ಕಿನಲ್ಲಿ, ಅಂದರೆ. ಈ ಸ್ಥಿತಿಯು ಕ್ರಿಯೆಯ ಮೌಲ್ಯದವರೆಗೆ ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ ಉದ್ದಕ್ಕೂ ಚಲನೆ ಸಂಭವಿಸುತ್ತದೆ ಎಂದರ್ಥ f(x)ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಗಣಿತದ ದೃಷ್ಟಿಕೋನದಿಂದ, ಪ್ರತಿ ಪುನರಾವರ್ತನೆಯಲ್ಲಿ ಒಂದು ಆಯಾಮದ ಕನಿಷ್ಠೀಕರಣದ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವುದು ಅವಶ್ಯಕ ಎಕಾರ್ಯಗಳು ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಅಲ್ಗಾರಿದಮ್ ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ. 1. ಆರಂಭಿಕ ಹಂತದ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಹೊಂದಿಸಿ X.
2. ಹಂತದಲ್ಲಿ X[ಆರ್],
ಕೆ = 0, 1, 2, ... ಗ್ರೇಡಿಯಂಟ್ ಮೌಲ್ಯವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತದೆ f'(x[ಆರ್])
. 3. ಹಂತದ ಗಾತ್ರವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಎ k, ಒಂದು ಆಯಾಮದ ಕನಿಷ್ಠೀಕರಣದ ಮೂಲಕ ಎಕಾರ್ಯಗಳು j (ಎ) = f(x[ಆರ್]-af"(x[ಆರ್])).
4. ಬಿಂದುವಿನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ X[X[ 1]: x ನಾನು [ X[ 1]= x i[ಆರ್]- a k f'i (x[ಆರ್]), ನಾನು = 1,..., ಪು. 5. ಸ್ಟೆರೇಶನ್ ಪ್ರಕ್ರಿಯೆಯನ್ನು ನಿಲ್ಲಿಸುವ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಪರಿಶೀಲಿಸಲಾಗುತ್ತದೆ. ಅವುಗಳನ್ನು ಪೂರೈಸಿದರೆ, ಲೆಕ್ಕಾಚಾರಗಳು ನಿಲ್ಲುತ್ತವೆ. ಇಲ್ಲದಿದ್ದರೆ, ಹಂತ 1 ಕ್ಕೆ ಹೋಗಿ. ಪರಿಗಣನೆಯಲ್ಲಿರುವ ವಿಧಾನದಲ್ಲಿ, ಬಿಂದುವಿನಿಂದ ಚಲನೆಯ ನಿರ್ದೇಶನ X[ಆರ್] ಹಂತದಲ್ಲಿ ಮಟ್ಟದ ರೇಖೆಯನ್ನು ಮುಟ್ಟುತ್ತದೆ k+[X[ 1] (ಚಿತ್ರ 2.9). ಅವರೋಹಣ ಪಥವು ಅಂಕುಡೊಂಕಾದದ್ದು, ಪಕ್ಕದ ಅಂಕುಡೊಂಕಾದ ಲಿಂಕ್ಗಳು ಪರಸ್ಪರ ಆರ್ಥೋಗೋನಲ್ ಆಗಿರುತ್ತವೆ. ವಾಸ್ತವವಾಗಿ, ಒಂದು ಹೆಜ್ಜೆ ಎ k ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ ಆಯ್ಕೆಮಾಡಲಾಗಿದೆ ಎಕಾರ್ಯಗಳು? (ಎ) = f(x f'(x -af"(x[ಆರ್]))
. ಕನಿಷ್ಠ ಕಾರ್ಯಕ್ಕೆ ಅಗತ್ಯವಾದ ಸ್ಥಿತಿಜ (a)/da = 0.ಸಂಕೀರ್ಣ ಕ್ರಿಯೆಯ ವ್ಯುತ್ಪನ್ನವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಿದ ನಂತರ, ನೆರೆಯ ಬಿಂದುಗಳಲ್ಲಿ ಮೂಲದ ದಿಕ್ಕುಗಳ ವಾಹಕಗಳ ಆರ್ಥೋಗೋನಾಲಿಟಿಯ ಸ್ಥಿತಿಯನ್ನು ನಾವು ಪಡೆಯುತ್ತೇವೆ: dj (a)/da = -f’(x[X[ 1]f'(x[ಆರ್])
= 0.
ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನದ ಜ್ಯಾಮಿತೀಯ ವ್ಯಾಖ್ಯಾನ ಮೃದುವಾದ ಪೀನ ಕಾರ್ಯಗಳಿಗಾಗಿ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳು ಹೆಚ್ಚಿನ ವೇಗದಲ್ಲಿ (ಜ್ಯಾಮಿತೀಯ ಪ್ರಗತಿಯ ವೇಗ) ಕನಿಷ್ಠಕ್ಕೆ ಒಮ್ಮುಖವಾಗುತ್ತವೆ. ಅಂತಹ ಕಾರ್ಯಗಳು ಶ್ರೇಷ್ಠತೆಯನ್ನು ಹೊಂದಿವೆಎಂ ಮತ್ತು ಕನಿಷ್ಠಮೀ ಎರಡನೇ ಉತ್ಪನ್ನಗಳ ಮ್ಯಾಟ್ರಿಕ್ಸ್ನ ಐಜೆನ್ವಾಲ್ಯೂಗಳು (ಹೆಸ್ಸಿಯನ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್) ಪರಸ್ಪರ ಸ್ವಲ್ಪ ಭಿನ್ನವಾಗಿರುತ್ತವೆ, ಅಂದರೆ ಮ್ಯಾಟ್ರಿಕ್ಸ್ N(x) ಉತ್ತಮ ನಿಯಮಾಧೀನ. ಐಜೆನ್ವಾಲ್ಯೂಸ್ ಎಲ್ ಐ, ಎಂದು ನೆನಪಿಸಿಕೊಳ್ಳಿ
=1, …, ಎನ್ i , ಮಾತೃಕೆಗಳು ವಿಶಿಷ್ಟ ಸಮೀಕರಣದ ಮೂಲಗಳಾಗಿವೆ ಆದಾಗ್ಯೂ, ಪ್ರಾಯೋಗಿಕವಾಗಿ, ನಿಯಮದಂತೆ, ಕಡಿಮೆಗೊಳಿಸಲಾದ ಕಾರ್ಯಗಳು ಎರಡನೇ ಉತ್ಪನ್ನಗಳ ಕೆಟ್ಟ-ನಿಯಂತ್ರಿತ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅನ್ನು ಹೊಂದಿವೆ.<<
(t/m 1) ಕೆಲವು ದಿಕ್ಕುಗಳಲ್ಲಿ ಅಂತಹ ಕಾರ್ಯಗಳ ಮೌಲ್ಯಗಳು ಇತರ ದಿಕ್ಕುಗಳಿಗಿಂತ ಹೆಚ್ಚು ವೇಗವಾಗಿ ಬದಲಾಗುತ್ತವೆ (ಕೆಲವೊಮ್ಮೆ ಪರಿಮಾಣದ ಹಲವಾರು ಆದೇಶಗಳಿಂದ). ಸರಳವಾದ ಪ್ರಕರಣದಲ್ಲಿ ಅವುಗಳ ಮಟ್ಟದ ಮೇಲ್ಮೈಗಳು ಬಲವಾಗಿ ಉದ್ದವಾಗಿರುತ್ತವೆ (ಚಿತ್ರ 2.10), ಮತ್ತು ಹೆಚ್ಚು ಸಂಕೀರ್ಣ ಸಂದರ್ಭಗಳಲ್ಲಿ ಅವು ಬಾಗಿ ಕಂದರಗಳಂತೆ ಕಾಣುತ್ತವೆ. ಅಂತಹ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಕಾರ್ಯಗಳನ್ನು ಕರೆಯಲಾಗುತ್ತದೆಗಲ್ಲಿ ಅಕ್ಕಿ. 2.10. ಗಲ್ಲಿ ಕಾರ್ಯ Xಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳ ಒಮ್ಮುಖ ದರವು ಗ್ರೇಡಿಯಂಟ್ ಲೆಕ್ಕಾಚಾರಗಳ ನಿಖರತೆಯ ಮೇಲೆ ಗಮನಾರ್ಹವಾಗಿ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ. ಕನಿಷ್ಠ ಬಿಂದುಗಳ ಸಮೀಪದಲ್ಲಿ ಅಥವಾ ಗಲ್ಲಿ ಪರಿಸ್ಥಿತಿಯಲ್ಲಿ ಸಾಮಾನ್ಯವಾಗಿ ಸಂಭವಿಸುವ ನಿಖರತೆಯ ನಷ್ಟವು ಸಾಮಾನ್ಯವಾಗಿ ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ಪ್ರಕ್ರಿಯೆಯ ಒಮ್ಮುಖವನ್ನು ಅಡ್ಡಿಪಡಿಸುತ್ತದೆ. ಮೇಲಿನ ಕಾರಣಗಳಿಂದಾಗಿ, ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವ ಆರಂಭಿಕ ಹಂತದಲ್ಲಿ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳನ್ನು ಇತರ, ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ವಿಧಾನಗಳ ಸಂಯೋಜನೆಯಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪಾಯಿಂಟ್ ಕನಿಷ್ಠ ಬಿಂದುವಿನಿಂದ ದೂರವಿದೆ, ಮತ್ತು ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಹಂತಗಳು ಕಾರ್ಯದಲ್ಲಿ ಗಮನಾರ್ಹ ಇಳಿಕೆಯನ್ನು ಸಾಧಿಸಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಮೇಲೆ ಚರ್ಚಿಸಿದ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳು ಸಾಮಾನ್ಯ ಸಂದರ್ಭದಲ್ಲಿ ಒಂದು ಕ್ರಿಯೆಯ ಕನಿಷ್ಠ ಬಿಂದುವನ್ನು ಅನಂತ ಸಂಖ್ಯೆಯ ಪುನರಾವರ್ತನೆಗಳಲ್ಲಿ ಮಾತ್ರ ಕಂಡುಕೊಳ್ಳುತ್ತವೆ. ಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವು ಹುಡುಕಾಟ ನಿರ್ದೇಶನಗಳನ್ನು ಉತ್ಪಾದಿಸುತ್ತದೆ, ಅದು ಕಾರ್ಯದ ಜ್ಯಾಮಿತಿಯನ್ನು ಕಡಿಮೆಗೊಳಿಸುವುದರೊಂದಿಗೆ ಹೆಚ್ಚು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಇದು ಅವುಗಳ ಒಮ್ಮುಖದ ವೇಗವನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಹೆಚ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಉದಾಹರಣೆಗೆ, ಚತುರ್ಭುಜ ಕಾರ್ಯವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಅನುಮತಿಸುತ್ತದೆ f(x) = (x, Hx) + (b, x) + aಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್ನೊಂದಿಗೆ ಎನ್ಫಂಕ್ಷನ್ ವೇರಿಯಬಲ್ಗಳ ಸಂಖ್ಯೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಕನಿಷ್ಠ ಬಿಂದುವಿನ ಸಮೀಪದಲ್ಲಿರುವ ಯಾವುದೇ ಮೃದುವಾದ ಕಾರ್ಯವನ್ನು ಕ್ವಾಡ್ರಾಟಿಕ್ ಫಂಕ್ಷನ್ನಿಂದ ಚೆನ್ನಾಗಿ ಅಂದಾಜಿಸಬಹುದು, ಆದ್ದರಿಂದ ಕ್ವಾಡ್ರಾಟಿಕ್ ಅಲ್ಲದ ಕಾರ್ಯಗಳನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳನ್ನು ಯಶಸ್ವಿಯಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಅವರು ಸೀಮಿತವಾಗಿರುವುದನ್ನು ನಿಲ್ಲಿಸುತ್ತಾರೆ ಮತ್ತು ಪುನರಾವರ್ತಿತರಾಗುತ್ತಾರೆ. ಎನ್ವ್ಯಾಖ್ಯಾನದಿಂದ, ಎರಡು X- ಆಯಾಮದ ವೆಕ್ಟರ್ ಮತ್ತುನಲ್ಲಿ ಎಂದು ಕರೆದರುಸಂಯೋಜಿತ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆಎಚ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ(ಅಥವಾ -ಸಂಯೋಜಕ), ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನವಾಗಿದ್ದರೆ, (xಸರಿ) = 0. ಇಲ್ಲಿಎನ್ - ಗಾತ್ರದ ಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಎನ್ X ಪು. ಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳಲ್ಲಿನ ಅತ್ಯಂತ ಮಹತ್ವದ ಸಮಸ್ಯೆಯೆಂದರೆ ದಿಕ್ಕುಗಳನ್ನು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ನಿರ್ಮಿಸುವ ಸಮಸ್ಯೆ. ಫ್ಲೆಚರ್-ರೀವ್ಸ್ ವಿಧಾನವು ಪ್ರತಿ ಹಂತದಲ್ಲೂ ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ ಅನ್ನು ಪರಿವರ್ತಿಸುವ ಮೂಲಕ ಈ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುತ್ತದೆ[ಆರ್])
-f(x ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್],
ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆಪು ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು, ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು, ..., ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು[ಆರ್- ಹಿಂದೆ ಕಂಡುಕೊಂಡ ನಿರ್ದೇಶನಗಳೊಂದಿಗೆ ಸಂಯೋಜಿಸಿ -1].. ಕಡಿಮೆಗೊಳಿಸುವಿಕೆಯ ಸಮಸ್ಯೆಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ನಾವು ಮೊದಲು ಈ ವಿಧಾನವನ್ನು ಪರಿಗಣಿಸೋಣ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು[ಆರ್ಚತುರ್ಭುಜ ಕಾರ್ಯ ನಿರ್ದೇಶನಗಳು ಆರ್] = -f'(x[ಆರ್])
] ಸೂತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ: ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್ಪು[ ಆರ್>= 1; +b k-1 -l],’-ಸಂಯೋಜಕ), ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನವಾಗಿದ್ದರೆ)
. p = - ಆರ್ f ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್], ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು[ಆರ್ b ಮೌಲ್ಯಗಳು ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ-1 ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗಿದೆ ಆದ್ದರಿಂದ ದಿಕ್ಕುಗಳು :
(ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್], -1] ಇದ್ದರು[- ಸಂಯೋಗ 1])= 0.
HP ಕೆ- ಪರಿಣಾಮವಾಗಿ, ಚತುರ್ಭುಜ ಕಾರ್ಯಕ್ಕಾಗಿ ಆರ್+l] ಪುನರಾವರ್ತಿತ ಕಡಿಮೆಗೊಳಿಸುವಿಕೆ ಪ್ರಕ್ರಿಯೆಯು ರೂಪವನ್ನು ಹೊಂದಿದೆ[ಆರ್]x[[ಆರ್], =x ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು[ಆರ್] -
+ಎ ಕೆ ಪಿ - ಸಂಯೋಗಎಲ್ಲಿ ಮೂಲದ ದಿಕ್ಕುಮೀ ಹೆಜ್ಜೆ; ಮತ್ತು ಕೆ -ಹಂತದ ಗಾತ್ರ. ಎಎರಡನೆಯದನ್ನು ಕಾರ್ಯದ ಕನಿಷ್ಠ ಸ್ಥಿತಿಯಿಂದ ಆಯ್ಕೆಮಾಡಲಾಗಿದೆ f(x[ ಆರ್] + f(x)[ಆರ್])
= f(x[ಆರ್] + ಮೂಲಕ [ಆರ್])
. ಚಲನೆಯ ದಿಕ್ಕಿನಲ್ಲಿ, ಅಂದರೆ ಒಂದು ಆಯಾಮದ ಕಡಿಮೆಗೊಳಿಸುವಿಕೆಯ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವ ಪರಿಣಾಮವಾಗಿ: ಒಂದು ಕೆ ಆರ್ ar Xಚತುರ್ಭುಜ ಕಾರ್ಯಕ್ಕಾಗಿ ದಿಕ್ಕಿನಲ್ಲಿ = -f'(x)
. ಫ್ಲೆಚರ್-ರೀವ್ಸ್ ಕಾಂಜುಗೇಟ್ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನದ ಅಲ್ಗಾರಿದಮ್ ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ. - ಸಂಯೋಗ 1. ಹಂತದಲ್ಲಿ ಎಲೆಕ್ಕ ಹಾಕಲಾಗಿದೆ .
2. ಆನ್ X[X[ 1]. m ಹಂತ, ಮೇಲಿನ ಸೂತ್ರಗಳನ್ನು ಬಳಸಿ, ಹಂತವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ f(x[ಆರ್+1])
ಕೆ f'(x[ಆರ್+1])
. ಮತ್ತು ಅವಧಿ f'(x)
3. ಮೌಲ್ಯಗಳನ್ನು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ X[ಆರ್ಮತ್ತು 4. ವೇಳೆ= 0, ನಂತರ ಪಾಯಿಂಟ್ ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್+1] ಕಾರ್ಯದ ಕನಿಷ್ಠ ಬಿಂದುವಾಗಿದೆ f(x) ಗಾತ್ರದ ಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಇಲ್ಲದಿದ್ದರೆ, ಹೊಸ ದಿಕ್ಕನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ +l] ಸಂಬಂಧದಿಂದಮತ್ತು ಮುಂದಿನ ಪುನರಾವರ್ತನೆಗೆ ಪರಿವರ್ತನೆಯನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ. ಈ ಕಾರ್ಯವಿಧಾನವು ಕ್ವಾಡ್ರಾಟಿಕ್ ಫಂಕ್ಷನ್ನ ಕನಿಷ್ಠವನ್ನು ಹೆಚ್ಚಿನದರಲ್ಲಿ ಕಂಡುಹಿಡಿಯುವುದಿಲ್ಲ Xಹಂತಗಳು. X[ಗಾತ್ರದ ಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಕ್ವಾಡ್ರಾಟಿಕ್ ಅಲ್ಲದ ಕಾರ್ಯಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುವಾಗ, ಫ್ಲೆಚರ್-ರೀವ್ಸ್ ವಿಧಾನವು ಸೀಮಿತದಿಂದ ಪುನರಾವರ್ತನೆಯಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ನಂತರ ಪರಿಣಾಮವಾಗಿ, ಚತುರ್ಭುಜ ಕಾರ್ಯಕ್ಕಾಗಿ ಆರ್+l] (p+[ಆರ್]x[[ಆರ್],
ನಿರ್ದೇಶನಗಳು ಆರ್] 1) ಕಾರ್ಯವಿಧಾನದ 1-4 ನೇ ಪುನರಾವರ್ತನೆಯನ್ನು ಬದಲಿಯಾಗಿ ಆವರ್ತಕವಾಗಿ ಪುನರಾವರ್ತಿಸಲಾಗುತ್ತದೆ[ಆರ್])+
ಮೇಲೆ - ಸಂಯೋಗ 1 ದಿಕ್ಕಿನಲ್ಲಿ[ಆರ್ಪು[ ಆರ್>= 1; +1] , ಮತ್ತು ಲೆಕ್ಕಾಚಾರಗಳು ಇಲ್ಲಿ ಕೊನೆಗೊಳ್ಳುತ್ತವೆ, ಅಲ್ಲಿ ಕೊಟ್ಟಿರುವ ಸಂಖ್ಯೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವಿಧಾನದ ಕೆಳಗಿನ ಮಾರ್ಪಾಡುಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ: k+); f(x[ ಆರ್] + = x[ಆರ್])
= f(x[ಆರ್] = -f’(x[ಆರ್];
ಬಿ p = -f’(ಒಂದು ಕೆ ಪಿ p = -f’(+ap ಇಲ್ಲಿ I ಗಾತ್ರದ ಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್- ಅನೇಕ ಸೂಚ್ಯಂಕಗಳು: = (0, n, 2 p, ಸಂಬಳ, ...) X, ಅಂದರೆ ವಿಧಾನವನ್ನು ಪ್ರತಿ ನವೀಕರಿಸಲಾಗುತ್ತದೆ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು = ಹಂತಗಳು.ಜ್ಯಾಮಿತೀಯ ಅರ್ಥ Xಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವು ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ (ಚಿತ್ರ 2.11). ನೀಡಿದ ಪ್ರಾರಂಭದ ಹಂತದಿಂದ ಅವರೋಹಣವನ್ನು ದಿಕ್ಕಿನಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ-ಎಫ್"(x Xದಿಕ್ಕಿನಲ್ಲಿ ಕಾರ್ಯದ ಕನಿಷ್ಠ ಬಿಂದುವಾಗಿದೆ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು,
ಅದು ] ವಿರೋಧಿ ಗ್ರೇಡಿಯಂಟ್ -)
ವಾಹಕದಿಂದ ಆರ್ಥೋಗೋನಲ್ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು. ನಂತರ ವೆಕ್ಟರ್ ಕಂಡುಬರುತ್ತದೆ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು , ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ- ಗೆ ಸಂಯೋಗ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದು. ಮುಂದೆ, ನಾವು ದಿಕ್ಕಿನಲ್ಲಿ ಕನಿಷ್ಠ ಕಾರ್ಯವನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ ಮೂಲದ ದಿಕ್ಕನ್ನು ಆರಿಸಿಕೊಳ್ಳುವುದುಇತ್ಯಾದಿ ಸಂಯೋಜಿತ ದಿಕ್ಕಿನ ವಿಧಾನಗಳು ಕಡಿಮೆಗೊಳಿಸುವಿಕೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಅತ್ಯಂತ ಪರಿಣಾಮಕಾರಿಯಾಗಿದೆ. ಆದಾಗ್ಯೂ, ಎಣಿಕೆಯ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಸಂಭವಿಸುವ ದೋಷಗಳಿಗೆ ಅವರು ಸೂಕ್ಷ್ಮವಾಗಿರುತ್ತಾರೆ ಎಂದು ಗಮನಿಸಬೇಕು. ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಅಸ್ಥಿರಗಳೊಂದಿಗೆ, ದೋಷವು ತುಂಬಾ ಹೆಚ್ಚಾಗಬಹುದು, ಚತುರ್ಭುಜ ಕಾರ್ಯಕ್ಕಾಗಿ ಸಹ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪುನರಾವರ್ತಿಸಬೇಕಾಗುತ್ತದೆ, ಅಂದರೆ ಅದರ ಪ್ರಕ್ರಿಯೆಯು ಯಾವಾಗಲೂ ಹೊಂದಿಕೆಯಾಗುವುದಿಲ್ಲ. ಗಾತ್ರದ ಸಮ್ಮಿತೀಯ ಧನಾತ್ಮಕ ನಿರ್ದಿಷ್ಟ ಮ್ಯಾಟ್ರಿಕ್ಸ್- ಅನೇಕ ಸೂಚ್ಯಂಕಗಳು: ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನ (ಇಂಗ್ಲಿಷ್ ಸಾಹಿತ್ಯದಲ್ಲಿ "ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನ") ಆಪ್ಟಿಮೈಸೇಶನ್ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಪುನರಾವರ್ತಿತ ಸಂಖ್ಯಾತ್ಮಕ ವಿಧಾನವಾಗಿದೆ (ಮೊದಲ ಕ್ರಮ), ಇದು ವಸ್ತುನಿಷ್ಠ ಕಾರ್ಯದ ತೀವ್ರತೆಯನ್ನು (ಕನಿಷ್ಠ ಅಥವಾ ಗರಿಷ್ಠ) ನಿರ್ಧರಿಸಲು ನಿಮಗೆ ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ: ಪರಿಗಣನೆಯಲ್ಲಿರುವ ವಿಧಾನಕ್ಕೆ ಅನುಗುಣವಾಗಿ, ವಸ್ತುನಿಷ್ಠ ಕ್ರಿಯೆಯ ತೀವ್ರತೆಯನ್ನು (ಗರಿಷ್ಠ ಅಥವಾ ಕನಿಷ್ಠ) ಕಾರ್ಯದ ವೇಗದ ಹೆಚ್ಚಳದ (ಕಡಿಮೆ) ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಅಂದರೆ. ಕ್ರಿಯೆಯ ಗ್ರೇಡಿಯಂಟ್ (ವಿರೋಧಿ ಗ್ರೇಡಿಯಂಟ್) ದಿಕ್ಕಿನಲ್ಲಿ. ಒಂದು ಹಂತದಲ್ಲಿ ಗ್ರೇಡಿಯಂಟ್ ಕಾರ್ಯ ಇಲ್ಲಿ i, j,..., n ಸಮನ್ವಯ ಅಕ್ಷಗಳಿಗೆ ಸಮಾನಾಂತರವಾಗಿರುವ ಘಟಕ ವೆಕ್ಟರ್ಗಳಾಗಿವೆ. ಬೇಸ್ ಪಾಯಿಂಟ್ನಲ್ಲಿ ಗ್ರೇಡಿಯಂಟ್ ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನವಾಗಿದೆ ಮತ್ತಷ್ಟು ಅಭಿವೃದ್ಧಿಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ವಿಧಾನ. ಸಾಮಾನ್ಯವಾಗಿ, ಕಾರ್ಯದ ತೀವ್ರತೆಯನ್ನು ಕಂಡುಹಿಡಿಯುವ ಪ್ರಕ್ರಿಯೆಯು ಪುನರಾವರ್ತಿತ ವಿಧಾನವಾಗಿದೆ, ಇದನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಬರೆಯಲಾಗಿದೆ: ಅಲ್ಲಿ "+" ಚಿಹ್ನೆಯನ್ನು ಫಂಕ್ಷನ್ನ ಗರಿಷ್ಠವನ್ನು ಕಂಡುಹಿಡಿಯಲು ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು "-" ಚಿಹ್ನೆಯನ್ನು ಕನಿಷ್ಠ ಕಾರ್ಯವನ್ನು ಕಂಡುಹಿಡಿಯಲು ಬಳಸಲಾಗುತ್ತದೆ; ಘಟಕ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್, ಇದನ್ನು ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ: ಹಂತ ಗಾತ್ರವನ್ನು ನಿರ್ಧರಿಸುವ ಸ್ಥಿರಾಂಕ ಮತ್ತು ಎಲ್ಲಾ i-th ದಿಕ್ಕುಗಳಿಗೆ ಒಂದೇ ಆಗಿರುತ್ತದೆ. ಚಲನೆಯ ದಿಕ್ಕಿನಲ್ಲಿ ಕನಿಷ್ಠ ವಸ್ತುನಿಷ್ಠ ಕ್ರಿಯೆಯ ಎಫ್ (x) ಸ್ಥಿತಿಯಿಂದ ಹಂತದ ಗಾತ್ರವನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ, ಅಂದರೆ, ಗ್ರೇಡಿಯಂಟ್ ಅಥವಾ ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಒಂದು ಆಯಾಮದ ಆಪ್ಟಿಮೈಸೇಶನ್ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವ ಪರಿಣಾಮವಾಗಿ: ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಹೇಳುವುದಾದರೆ, ಈ ಸಮೀಕರಣವನ್ನು ಪರಿಹರಿಸುವ ಮೂಲಕ ಹಂತದ ಗಾತ್ರವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ: ಹೀಗಾಗಿ, ಲೆಕ್ಕಾಚಾರದ ಹಂತವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ, ಅಂದರೆ ಕಾರ್ಯವು ಸುಧಾರಿಸುವವರೆಗೆ ಚಲನೆಯನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ, ಹೀಗಾಗಿ ಕೆಲವು ಹಂತದಲ್ಲಿ ತೀವ್ರತೆಯನ್ನು ತಲುಪುತ್ತದೆ. ಈ ಹಂತದಲ್ಲಿ, ಹುಡುಕಾಟದ ದಿಕ್ಕನ್ನು ಮತ್ತೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ (ಗ್ರೇಡಿಯಂಟ್ ಬಳಸಿ) ಮತ್ತು ವಸ್ತುನಿಷ್ಠ ಕಾರ್ಯದ ಹೊಸ ಆಪ್ಟಿಮಮ್ ಪಾಯಿಂಟ್ ಅನ್ನು ಹುಡುಕಲಾಗುತ್ತದೆ, ಇತ್ಯಾದಿ. ಹೀಗಾಗಿ, ಈ ವಿಧಾನದಲ್ಲಿ, ಹುಡುಕಾಟವು ದೊಡ್ಡ ಹಂತಗಳಲ್ಲಿ ಸಂಭವಿಸುತ್ತದೆ ಮತ್ತು ಕಾರ್ಯದ ಗ್ರೇಡಿಯಂಟ್ ಅನ್ನು ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಬಿಂದುಗಳಲ್ಲಿ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ. ಎರಡು ಅಸ್ಥಿರಗಳ ಕಾರ್ಯದ ಸಂದರ್ಭದಲ್ಲಿ ಈ ವಿಧಾನಕೆಳಗಿನ ಜ್ಯಾಮಿತೀಯ ವ್ಯಾಖ್ಯಾನವನ್ನು ಹೊಂದಿದೆ: ಒಂದು ಬಿಂದುವಿನಿಂದ ಚಲನೆಯ ದಿಕ್ಕು ಹಂತದಲ್ಲಿ ಮಟ್ಟದ ರೇಖೆಯನ್ನು ಮುಟ್ಟುತ್ತದೆ. ಅವರೋಹಣ ಪಥವು ಅಂಕುಡೊಂಕಾದದ್ದು, ಪಕ್ಕದ ಅಂಕುಡೊಂಕಾದ ಲಿಂಕ್ಗಳು ಪರಸ್ಪರ ಆರ್ಥೋಗೋನಲ್ ಆಗಿರುತ್ತವೆ. ನೆರೆಯ ಬಿಂದುಗಳಲ್ಲಿ ಮೂಲದ ದಿಕ್ಕುಗಳ ವಾಹಕಗಳ ಆರ್ಥೋಗೋನಾಲಿಟಿಯ ಸ್ಥಿತಿಯನ್ನು ಈ ಕೆಳಗಿನ ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ಬರೆಯಲಾಗಿದೆ: ಕಡಿದಾದ ಮೂಲದ ವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ತೀವ್ರ ಬಿಂದುವಿಗೆ ಚಲನೆಯ ಪಥವನ್ನು ಎಫ್ (x) ಕಾರ್ಯದ ಸಮಾನ ಹಂತದ ರೇಖೆಯ ಗ್ರಾಫ್ನಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ ಪುನರಾವರ್ತಿತ ಲೆಕ್ಕಾಚಾರದ ಹಂತದಲ್ಲಿ (ಹಲವಾರು ಮಾನದಂಡಗಳು) ಸೂಕ್ತವಾದ ಪರಿಹಾರದ ಹುಡುಕಾಟವು ಕೊನೆಗೊಳ್ಳುತ್ತದೆ: ಪ್ರಸ್ತುತ ಹುಡುಕಾಟ ಬಿಂದುವಿನ ಸಣ್ಣ ನೆರೆಹೊರೆಯಲ್ಲಿ ಹುಡುಕಾಟ ಪಥವು ಉಳಿದಿದೆ: ವಸ್ತುನಿಷ್ಠ ಕಾರ್ಯದ ಹೆಚ್ಚಳವು ಬದಲಾಗುವುದಿಲ್ಲ: ಸ್ಥಳೀಯ ಕನಿಷ್ಠ ಹಂತದಲ್ಲಿ ವಸ್ತುನಿಷ್ಠ ಕ್ರಿಯೆಯ ಗ್ರೇಡಿಯಂಟ್ ಶೂನ್ಯವಾಗುತ್ತದೆ: ಕಂದರದ ಉದ್ದಕ್ಕೂ ಚಲಿಸುವಾಗ ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ವಿಧಾನವು ತುಂಬಾ ನಿಧಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ವಸ್ತುನಿಷ್ಠ ಕಾರ್ಯದಲ್ಲಿ ಅಸ್ಥಿರಗಳ ಸಂಖ್ಯೆ ಹೆಚ್ಚಾದಂತೆ, ವಿಧಾನದ ಈ ನಡವಳಿಕೆಯು ವಿಶಿಷ್ಟವಾಗುತ್ತದೆ ಎಂದು ಗಮನಿಸಬೇಕು. ಕಂದರವು ಖಿನ್ನತೆಯಾಗಿದ್ದು, ಅದರ ಮಟ್ಟದ ರೇಖೆಗಳು ಸುಮಾರು ಅರೆ-ಅಕ್ಷಗಳೊಂದಿಗೆ ದೀರ್ಘವೃತ್ತಗಳ ಆಕಾರವನ್ನು ಹೊಂದಿರುತ್ತವೆ. ಕಂದರದ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ, ಅವರೋಹಣ ಪಥವು ಒಂದು ಸಣ್ಣ ಹೆಜ್ಜೆಯೊಂದಿಗೆ ಅಂಕುಡೊಂಕಾದ ರೇಖೆಯ ರೂಪವನ್ನು ಪಡೆಯುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಕನಿಷ್ಠಕ್ಕೆ ಇಳಿಯುವ ವೇಗವು ಬಹಳವಾಗಿ ನಿಧಾನಗೊಳ್ಳುತ್ತದೆ. ಈ ಕಾರ್ಯಗಳ ಆಂಟಿಗ್ರೇಡಿಯಂಟ್ನ ದಿಕ್ಕು ದಿಕ್ಕಿನಿಂದ ಕನಿಷ್ಠ ಬಿಂದುವಿಗೆ ಗಮನಾರ್ಹವಾಗಿ ವಿಚಲನಗೊಳ್ಳುತ್ತದೆ ಎಂಬ ಅಂಶದಿಂದ ಇದನ್ನು ವಿವರಿಸಲಾಗಿದೆ, ಇದು ಲೆಕ್ಕಾಚಾರದಲ್ಲಿ ಹೆಚ್ಚುವರಿ ವಿಳಂಬಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ, ಅಲ್ಗಾರಿದಮ್ ಲೆಕ್ಕಾಚಾರದ ದಕ್ಷತೆಯನ್ನು ಕಳೆದುಕೊಳ್ಳುತ್ತದೆ. ಗಲ್ಲಿ ಕಾರ್ಯ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನವು ಅದರ ಅನೇಕ ಮಾರ್ಪಾಡುಗಳೊಂದಿಗೆ ವ್ಯಾಪಕವಾಗಿದೆ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ವಿಧಾನಅಧ್ಯಯನದ ಅಡಿಯಲ್ಲಿ ವಸ್ತುಗಳ ಅತ್ಯುತ್ತಮವಾದ ಹುಡುಕಾಟ. ಗ್ರೇಡಿಯಂಟ್ ಹುಡುಕಾಟದ ಅನನುಕೂಲವೆಂದರೆ (ಹಾಗೆಯೇ ಮೇಲೆ ಚರ್ಚಿಸಿದ ವಿಧಾನಗಳು) ಅದನ್ನು ಬಳಸುವಾಗ, ಕಾರ್ಯದ ಸ್ಥಳೀಯ ತೀವ್ರತೆಯನ್ನು ಮಾತ್ರ ಕಂಡುಹಿಡಿಯಬಹುದು. ಇತರರನ್ನು ಹುಡುಕಲು ಸ್ಥಳೀಯ ವಿಪರೀತಗಳುಇತರ ಆರಂಭಿಕ ಹಂತಗಳಿಂದ ಹುಡುಕುವುದು ಅವಶ್ಯಕ. ಒಮ್ಮುಖದ ವೇಗವೂ ಸಹ ಗ್ರೇಡಿಯಂಟ್ ವಿಧಾನಗಳುಗ್ರೇಡಿಯಂಟ್ ಲೆಕ್ಕಾಚಾರಗಳ ನಿಖರತೆಯ ಮೇಲೆ ಸಹ ಗಮನಾರ್ಹವಾಗಿ ಅವಲಂಬಿತವಾಗಿದೆ. ಕನಿಷ್ಠ ಬಿಂದುಗಳ ಸಮೀಪದಲ್ಲಿ ಅಥವಾ ಗಲ್ಲಿ ಪರಿಸ್ಥಿತಿಯಲ್ಲಿ ಸಾಮಾನ್ಯವಾಗಿ ಸಂಭವಿಸುವ ನಿಖರತೆಯ ನಷ್ಟವು ಸಾಮಾನ್ಯವಾಗಿ ಗ್ರೇಡಿಯಂಟ್ ಮೂಲದ ಪ್ರಕ್ರಿಯೆಯ ಒಮ್ಮುಖವನ್ನು ಅಡ್ಡಿಪಡಿಸುತ್ತದೆ. ಲೆಕ್ಕಾಚಾರದ ವಿಧಾನ ಹಂತ 1:ಕ್ರಿಯೆಯ ಗ್ರೇಡಿಯಂಟ್ ಅನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ವಿಶ್ಲೇಷಣಾತ್ಮಕ ಅಭಿವ್ಯಕ್ತಿಗಳ ವ್ಯಾಖ್ಯಾನ (ಸಾಂಕೇತಿಕ ರೂಪದಲ್ಲಿ) ಹಂತ 2: ಆರಂಭಿಕ ಅಂದಾಜು ಹೊಂದಿಸಿ ಹಂತ 3:ಕೊನೆಯ ಹುಡುಕಾಟ ದಿಕ್ಕನ್ನು ಮರುಹೊಂದಿಸಲು ಅಲ್ಗಾರಿದಮಿಕ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ಮರುಪ್ರಾರಂಭಿಸುವ ಅಗತ್ಯವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಮರುಪ್ರಾರಂಭದ ಪರಿಣಾಮವಾಗಿ, ಹುಡುಕಾಟವನ್ನು ಮತ್ತೆ ವೇಗವಾಗಿ ಇಳಿಯುವ ದಿಕ್ಕಿನಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ.
 .
.
f(x[ಆರ್]-ಎ ಕೆ ಎಫ್'(x[ಆರ್]))
= f(x f'(x – af"(x[ಆರ್]))
.
ಜ (ಎ) = f(x[ಆರ್]-af"(x[ಆರ್]))
.




![]() ,
,![]()
 .
.
![]() ನೈಜ ಡೊಮೇನ್ನಲ್ಲಿ ಫಂಕ್ಷನ್ ಆರ್ಗ್ಯುಮೆಂಟ್ (ನಿಯಂತ್ರಿತ ನಿಯತಾಂಕಗಳು) ಮೌಲ್ಯಗಳಾಗಿವೆ.
ನೈಜ ಡೊಮೇನ್ನಲ್ಲಿ ಫಂಕ್ಷನ್ ಆರ್ಗ್ಯುಮೆಂಟ್ (ನಿಯಂತ್ರಿತ ನಿಯತಾಂಕಗಳು) ಮೌಲ್ಯಗಳಾಗಿವೆ.![]() ನಿರ್ದೇಶಾಂಕಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಕಾರ್ಯದ ಭಾಗಶಃ ಉತ್ಪನ್ನಗಳ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲಿನ ಪ್ರಕ್ಷೇಪಣಗಳು ಒಂದು ವೆಕ್ಟರ್ ಆಗಿದೆ:
ನಿರ್ದೇಶಾಂಕಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಕಾರ್ಯದ ಭಾಗಶಃ ಉತ್ಪನ್ನಗಳ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲಿನ ಪ್ರಕ್ಷೇಪಣಗಳು ಒಂದು ವೆಕ್ಟರ್ ಆಗಿದೆ:![]() ಮೇಲ್ಮೈಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಆರ್ಥೋಗೋನಲ್ ಆಗಿದೆ, ಮತ್ತು ಅದರ ದಿಕ್ಕು ಕಾರ್ಯದಲ್ಲಿ ವೇಗವಾಗಿ ಹೆಚ್ಚಳದ ದಿಕ್ಕನ್ನು ತೋರಿಸುತ್ತದೆ ಮತ್ತು ವಿರುದ್ಧ ದಿಕ್ಕು (ಆಂಟಿಗ್ರೇಡಿಯಂಟ್), ಕ್ರಮವಾಗಿ, ಕ್ರಿಯೆಯ ವೇಗದ ಇಳಿಕೆಯ ದಿಕ್ಕನ್ನು ತೋರಿಸುತ್ತದೆ.
ಮೇಲ್ಮೈಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಆರ್ಥೋಗೋನಲ್ ಆಗಿದೆ, ಮತ್ತು ಅದರ ದಿಕ್ಕು ಕಾರ್ಯದಲ್ಲಿ ವೇಗವಾಗಿ ಹೆಚ್ಚಳದ ದಿಕ್ಕನ್ನು ತೋರಿಸುತ್ತದೆ ಮತ್ತು ವಿರುದ್ಧ ದಿಕ್ಕು (ಆಂಟಿಗ್ರೇಡಿಯಂಟ್), ಕ್ರಮವಾಗಿ, ಕ್ರಿಯೆಯ ವೇಗದ ಇಳಿಕೆಯ ದಿಕ್ಕನ್ನು ತೋರಿಸುತ್ತದೆ.

![]() - ಗ್ರೇಡಿಯಂಟ್ ಮಾಡ್ಯೂಲ್ ಗ್ರೇಡಿಯಂಟ್ ಅಥವಾ ಆಂಟಿ-ಗ್ರೇಡಿಯಂಟ್ ದಿಕ್ಕಿನಲ್ಲಿ ಕ್ರಿಯೆಯ ಹೆಚ್ಚಳ ಅಥವಾ ಇಳಿಕೆಯ ದರವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ:
- ಗ್ರೇಡಿಯಂಟ್ ಮಾಡ್ಯೂಲ್ ಗ್ರೇಡಿಯಂಟ್ ಅಥವಾ ಆಂಟಿ-ಗ್ರೇಡಿಯಂಟ್ ದಿಕ್ಕಿನಲ್ಲಿ ಕ್ರಿಯೆಯ ಹೆಚ್ಚಳ ಅಥವಾ ಇಳಿಕೆಯ ದರವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ:
![]()
![]()

![]()









