તમે ગ્રેડિયન્ટની દિશામાં શ્રેષ્ઠ બિંદુ માટે નહીં, પરંતુ વર્તમાન કરતાં વધુ સારા બિંદુ માટે પણ શોધી શકો છો.
તમામ સ્થાનિક ઓપ્ટિમાઇઝેશન પદ્ધતિઓનો અમલ કરવા માટે સૌથી સરળ. તદ્દન ધરાવે છે નબળી પરિસ્થિતિઓકન્વર્જન્સ, પરંતુ કન્વર્જન્સનો દર તદ્દન ઓછો (રેખીય) છે. ગ્રેડિયન્ટ મેથડ સ્ટેપનો ઉપયોગ ઘણીવાર અન્ય ઓપ્ટિમાઇઝેશન પદ્ધતિઓના ભાગ રૂપે થાય છે, જેમ કે ફ્લેચર-રીવ્સ પદ્ધતિ.
વર્ણન [ | ]
સુધારાઓ[ | ]
કોતર સાથે આગળ વધતી વખતે અને ચલોની સંખ્યામાં વધારા સાથે ઢાળવાળી વંશ પદ્ધતિ ખૂબ જ ધીમી હોય છે. ઉદ્દેશ્ય કાર્યપદ્ધતિનું આ વર્તન લાક્ષણિક બને છે. આ ઘટનાનો સામનો કરવા માટે, તેનો ઉપયોગ કરવામાં આવે છે, જેનો સાર ખૂબ જ સરળ છે. ઢાળના વંશના બે પગલાઓ બનાવ્યા પછી અને ત્રણ બિંદુઓ પ્રાપ્ત કર્યા પછી, ત્રીજું પગલું કોતરના તળિયે, પ્રથમ અને ત્રીજા બિંદુઓને જોડતા વેક્ટરની દિશામાં લેવું જોઈએ.
ચતુર્ભુજની નજીકના કાર્યો માટે, સંયોજક ઢાળ પદ્ધતિ અસરકારક છે.
કૃત્રિમ ન્યુરલ નેટવર્ક્સમાં એપ્લિકેશન[ | ]
ગ્રેડિયન્ટ ડિસેન્ટ પદ્ધતિ, કેટલાક ફેરફારો સાથે, પરસેપ્ટ્રોન તાલીમ માટે વ્યાપકપણે ઉપયોગમાં લેવાય છે અને કૃત્રિમ ન્યુરલ નેટવર્કના સિદ્ધાંતમાં બેકપ્રોપગેશન પદ્ધતિ તરીકે ઓળખાય છે. પરસેપ્ટ્રોન પ્રકારના ન્યુરલ નેટવર્કને તાલીમ આપતી વખતે, નેટવર્કના વજનના ગુણાંકમાં ફેરફાર કરવો જરૂરી છે જેથી કરીને તેને ન્યૂનતમ કરી શકાય. સરેરાશ ભૂલન્યુરલ નેટવર્કના આઉટપુટ પર જ્યારે તાલીમ ઇનપુટ ડેટાનો ક્રમ ઇનપુટને પૂરો પાડવામાં આવે છે. ઔપચારિક રીતે, ગ્રેડિયન્ટ ડિસેન્ટ મેથડનો ઉપયોગ કરીને માત્ર એક પગલું ભરવા માટે (નેટવર્ક પેરામીટર્સમાં માત્ર એક ફેરફાર કરો), ક્રમશઃ નેટવર્ક ઇનપુટ પર તાલીમ ડેટાનો સંપૂર્ણ સેટ સબમિટ કરવો જરૂરી છે, દરેક ઑબ્જેક્ટ માટે ભૂલની ગણતરી કરો. પ્રશિક્ષણ ડેટા અને નેટવર્ક ગુણાંકના જરૂરી સુધારાની ગણતરી કરો (પરંતુ આ કરેક્શન ન કરો), અને તમામ ડેટા સબમિટ કર્યા પછી, દરેક નેટવર્ક ગુણાંક (ગ્રેડિયન્ટ્સનો સરવાળો) ના સુધારણામાં રકમની ગણતરી કરો અને ગુણાંકને "એક પગલું" ઠીક કરો. . દેખીતી રીતે, પ્રશિક્ષણ ડેટાના મોટા સમૂહ સાથે, અલ્ગોરિધમ અત્યંત ધીમી ગતિએ કાર્ય કરશે, તેથી વ્યવહારમાં, નેટવર્ક ગુણાંકને ઘણીવાર દરેક તાલીમ ઘટક પછી સમાયોજિત કરવામાં આવે છે, જ્યાં ગ્રેડિયન્ટ મૂલ્ય ખર્ચ કાર્યના ઢાળ દ્વારા અંદાજિત કરવામાં આવે છે, માત્ર એક તાલીમ પર ગણતરી કરવામાં આવે છે. તત્વ આ પદ્ધતિ કહેવામાં આવે છે સ્ટોકેસ્ટિક ગ્રેડિયન્ટ વંશ અથવા ઓપરેશનલ ગ્રેડિયન્ટ વંશ . સ્ટોકેસ્ટિક ગ્રેડિયન્ટ ડિસેન્ટ એ સ્ટોકેસ્ટિક અંદાજનું એક સ્વરૂપ છે. સ્ટોકેસ્ટિક અંદાજનો સિદ્ધાંત સ્ટોકેસ્ટિક ગ્રેડિયન્ટ ડિસેન્ટ પદ્ધતિના કન્વર્જન્સ માટે શરતો પ્રદાન કરે છે.
લિંક્સ [ | ]
- જે. મેથ્યુસ.સ્ટીપ ડીસેન્ટ અથવા ગ્રેડિયન્ટ મેથડ માટે મોડ્યુલ. (અનુપલબ્ધ લિંક)
સાહિત્ય [ | ]
- અકુલિચ આઈ. એલ.ઉદાહરણો અને સમસ્યાઓમાં ગાણિતિક પ્રોગ્રામિંગ. - એમ.: ઉચ્ચ શાળા, 1986. - પૃષ્ઠ 298-310.
- ગિલ એફ., મુરે ડબલ્યુ., રાઈટ એમ.પ્રેક્ટિકલ ઑપ્ટિમાઇઝેશન = વ્યવહારિક ઑપ્ટિમાઇઝેશન. - એમ.: મીર, 1985.
- કોર્શુનોવ યુ., કોર્શુનોવ યુ.સાયબરનેટિક્સના ગાણિતિક પાયા. - M.: Energoatomizdat, 1972.
- મેક્સિમોવ યુ., ફિલિપોવસ્કાયા ઇ. એ.બિનરેખીય પ્રોગ્રામિંગ સમસ્યાઓ ઉકેલવા માટેના અલ્ગોરિધમ્સ. - એમ.: MEPhI, 1982.
- મેક્સિમોવ યુ.રેખીય અને અલગ પ્રોગ્રામિંગ માટે અલ્ગોરિધમ્સ. - એમ.: MEPhI, 1980.
- કોર્ન જી., કોર્ન ટી.વૈજ્ઞાનિકો અને એન્જિનિયરો માટે ગણિતની હેન્ડબુક. - એમ.: નૌકા, 1970. - પૃષ્ઠ 575-576.
- એસ. યુ. ગોરોડેત્સ્કી, વી. એ. ગ્રીશાગિન.નોનલાઇનર પ્રોગ્રામિંગ અને મલ્ટિએક્સ્ટ્રેમલ ઓપ્ટિમાઇઝેશન. - નિઝની નોવગોરોડ: નિઝની નોવગોરોડ યુનિવર્સિટી પબ્લિશિંગ હાઉસ, 2007. - પૃષ્ઠ 357-363.
સૌથી ઊંચો વંશ પદ્ધતિ એ વેરિયેબલ સ્ટેપ સાથેની ઢાળવાળી પદ્ધતિ છે. દરેક પુનરાવૃત્તિ પર, વંશની દિશામાં ફંક્શન f(x) ના ન્યૂનતમ શરતમાંથી પગલું કદ k પસંદ કરવામાં આવે છે, એટલે કે.
આ સ્થિતિનો અર્થ એવો થાય છે કે જ્યાં સુધી ફંક્શન f(x) નું મૂલ્ય ઘટે ત્યાં સુધી એન્ટિગ્રેડિયન્ટ સાથે હિલચાલ થાય છે. ગાણિતિક દૃષ્ટિકોણથી, દરેક પુનરાવર્તન પર કાર્ય દ્વારા એક-પરિમાણીય લઘુત્તમીકરણની સમસ્યાને હલ કરવી જરૂરી છે.
()=f (x (k) -f (x (k)))
ચાલો આ માટે ગોલ્ડન રેશિયો પદ્ધતિનો ઉપયોગ કરીએ.
સૌથી ઊંચો વંશ પદ્ધતિનો અલ્ગોરિધમ નીચે મુજબ છે.
પ્રારંભિક બિંદુ x (0) ના કોઓર્ડિનેટ્સ ઉલ્લેખિત છે.
બિંદુ x (k) , k = 0, 1, 2, ... પર, ઢાળ મૂલ્ય f (x (k)) ની ગણતરી કરવામાં આવે છે.
પગલું કદ k ફંક્શનનો ઉપયોગ કરીને એક-પરિમાણીય લઘુત્તમીકરણ દ્વારા નક્કી કરવામાં આવે છે
()=f (x (k) -f (x (k))).
બિંદુ x (k) ના કોઓર્ડિનેટ્સ નક્કી કરવામાં આવે છે:
x i (k+1) = x i (k) - k f i (x (k)), i=1, …, n.
પુનરાવર્તિત પ્રક્રિયાને રોકવા માટેની સ્થિતિ તપાસવામાં આવી છે:
||f (x (k +1))|| .
જો તે પરિપૂર્ણ થાય, તો ગણતરીઓ અટકી જાય છે. નહિંતર, અમે પગલું 1 પર આગળ વધીએ છીએ. સૌથી ઊભો વંશ પદ્ધતિનું ભૌમિતિક અર્થઘટન ફિગમાં રજૂ કરવામાં આવ્યું છે. 1.

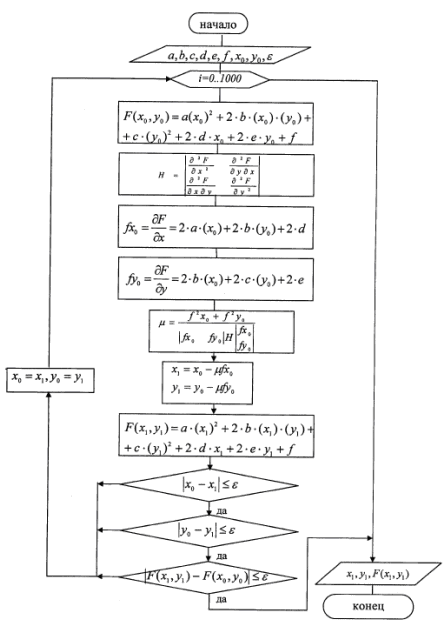
ચોખા. 2.1. સૌથી ઊભો વંશ પદ્ધતિનો બ્લોક ડાયાગ્રામ.
પ્રોગ્રામમાં પદ્ધતિનો અમલ:
સૌથી ઊભો ઉતરવાની પદ્ધતિ.

ચોખા. 2.2. સૌથી ઊભો વંશ પદ્ધતિનો અમલ.
નિષ્કર્ષ: અમારા કિસ્સામાં, પદ્ધતિ 7 પુનરાવર્તનોમાં ફેરવાઈ. પોઈન્ટ A7 (0.6641; -1.3313) એ એક્સ્ટ્રીમ પોઈન્ટ છે. સંયુક્ત દિશાઓની પદ્ધતિ. ચતુર્ભુજ કાર્યો માટે, તમે એક ઢાળ પદ્ધતિ બનાવી શકો છો જેમાં કન્વર્જન્સ સમય મર્યાદિત હશે અને ચલ n ની સંખ્યા જેટલી હશે.
ચાલો અમુક ચોક્કસ દિશા કહીએ અને અમુક હકારાત્મક ચોક્કસ હેસ મેટ્રિક્સ H ના સંદર્ભમાં જોડીએ જો:
પછી એટલે કે એકમ H માટે, સંયોજક દિશાનો અર્થ તેમની લંબ છે. સામાન્ય કિસ્સામાં, H બિન-તુચ્છ છે. IN સામાન્ય કેસકન્જુગેસી એ વેક્ટર પર હેસ મેટ્રિક્સનો ઉપયોગ છે - તેનો અર્થ એ છે કે આ વેક્ટરને અમુક ખૂણાથી ફેરવવું, તેને ખેંચવું અથવા સંકુચિત કરવું.

અને હવે વેક્ટર ઓર્થોગોનલ છે, એટલે કે કન્જુગેસી એ વેક્ટરની ઓર્થોગોનાલિટી નથી, પરંતુ ફરેલા વેક્ટરની ઓર્થોગોનાલિટી છે.


ચોખા. 2.3. સંયુક્ત દિશાઓ પદ્ધતિનો બ્લોક ડાયાગ્રામ.
પ્રોગ્રામમાં પદ્ધતિનો અમલ: સંયુક્ત દિશાઓની પદ્ધતિ.

ચોખા. 2.4. સંયુક્ત દિશાઓ પદ્ધતિનો અમલ.

ચોખા. 2.5. સંયુક્ત દિશાઓ પદ્ધતિનો આલેખ.
નિષ્કર્ષ: પોઈન્ટ A3 (0.6666; -1.3333) 3 પુનરાવૃત્તિઓમાં જોવા મળ્યો હતો અને તે એક આત્યંતિક બિંદુ છે.
3. પ્રતિબંધોની હાજરીમાં કાર્યનું લઘુત્તમ અને મહત્તમ મૂલ્ય નક્કી કરવા માટેની પદ્ધતિઓનું વિશ્લેષણ
ચાલો તે યાદ કરીએ સામાન્ય કાર્યશરતી ઓપ્ટિમાઇઝેશન આના જેવું લાગે છે
f(x) ® મિનિટ, x О W,
જ્યાં W એ R m નો યોગ્ય સબસેટ છે. સમાનતા-પ્રકારના અવરોધો સાથેની સમસ્યાઓનો પેટા વર્ગ એ હકીકત દ્વારા અલગ પડે છે કે સમૂહ ફોર્મના અવરોધો દ્વારા વ્યાખ્યાયિત થયેલ છે.
f i (x) = 0, જ્યાં f i: R m ®R (i = 1, …, k).
આમ, W = (x О R m: f i (x) = 0, i = 1, …, k).
ફંક્શન f માટે અનુક્રમણિકા "0" લખવાનું આપણા માટે અનુકૂળ રહેશે. આમ, સમાનતા પ્રકારના અવરોધો સાથેની ઑપ્ટિમાઇઝેશન સમસ્યા આ રીતે લખવામાં આવી છે
f 0 (x) ® મિનિટ, (3.1)
f i (x) = 0, i = 1, …, k. (3.2)
જો હવે આપણે R k માં મૂલ્યો સાથે R m પર f a ફંક્શન દ્વારા દર્શાવીએ છીએ, તો સંકલન સંકેત જેનું સ્વરૂપ f(x) = (f 1 (x), ..., f k (x)), પછી ( 3.1)-(3.2) આપણે તેને ફોર્મમાં પણ લખી શકીએ છીએ
f 0 (x) ® મિનિટ, f(x) = Q.
ભૌમિતિક રીતે, સમાનતા પ્રકારના અવરોધો સાથેની સમસ્યા એ મેનીફોલ્ડ પર ફંક્શન f 0 ના ગ્રાફના સૌથી નીચા બિંદુને શોધવાની સમસ્યા છે (જુઓ ફિગ. 3.1).

પોઈન્ટ જે તમામ પ્રતિબંધોને સંતોષે છે (એટલે કે, સમૂહ માંના પોઈન્ટ) સામાન્ય રીતે સ્વીકાર્ય કહેવાય છે. સ્વીકાર્ય બિંદુ x* એ f i (x) = 0, i = 1, ..., k (અથવા સમસ્યાનો ઉકેલ (3.1)–(3.2)) ના અવરોધો હેઠળ f 0 નું શરતી લઘુત્તમ કહેવાય છે, જો તમામ સ્વીકાર્ય બિંદુઓ માટે x f 0 (x *) f 0 (x). (3.3)
જો (3.3) પોઈન્ટ x* ના અમુક પડોશી V x * માં પડેલા સ્વીકાર્ય x માટે જ સંતુષ્ટ છે, તો અમે સ્થાનિક શરતી લઘુત્તમ વિશે વાત કરીએ છીએ. શરતી કડક સ્થાનિક અને વૈશ્વિક મિનિમાના ખ્યાલોને કુદરતી રીતે વ્યાખ્યાયિત કરવામાં આવે છે.
ઢાળ પદ્ધતિના આ સંસ્કરણમાં, લઘુત્તમ ક્રમ (X k) પણ નિયમ (2.22) અનુસાર બાંધવામાં આવે છે. જો કે, સહાયક એક-પરિમાણીય લઘુત્તમીકરણ સમસ્યાને ઉકેલવાના પરિણામે a k પગલું કદ જોવા મળે છે.
મિનિટ(j k(a) | a>0 ), (2.27)
જ્યાં j k(a)=f(X k - a· (X k)). આમ, એન્ટિગ્રેડિયન્ટની દિશામાં દરેક પુનરાવર્તન પર ![]() એક સંપૂર્ણ વંશ કરવામાં આવે છે. સમસ્યા (2.27) ઉકેલવા માટે, તમે વિભાગ 1 માં વર્ણવેલ એક-પરિમાણીય શોધ પદ્ધતિનો ઉપયોગ કરી શકો છો, ઉદાહરણ તરીકે, બીટવાઇઝ શોધ પદ્ધતિ અથવા ગોલ્ડન વિભાગ પદ્ધતિ.
એક સંપૂર્ણ વંશ કરવામાં આવે છે. સમસ્યા (2.27) ઉકેલવા માટે, તમે વિભાગ 1 માં વર્ણવેલ એક-પરિમાણીય શોધ પદ્ધતિનો ઉપયોગ કરી શકો છો, ઉદાહરણ તરીકે, બીટવાઇઝ શોધ પદ્ધતિ અથવા ગોલ્ડન વિભાગ પદ્ધતિ.
ચાલો સૌથી ઊભો વંશ પદ્ધતિના અલ્ગોરિધમનું વર્ણન કરીએ.
પગલું 0.ચોકસાઈ પરિમાણ e>0 સેટ કરો, X 0 ОE n પસંદ કરો, k=0 સેટ કરો.
પગલું 1.(X k) શોધો અને સ્પષ્ટ કરેલ ચોકસાઈ હાંસલ કરવા માટેની સ્થિતિ તપાસો || (x k) ||£ e. જો તે પરિપૂર્ણ થાય, તો પછી પગલું 3 પર જાઓ, અન્યથા - પગલું 2 પર.
પગલું 2.સમસ્યા ઉકેલો (2.27), એટલે કે. એક k શોધો. આગળનો મુદ્દો શોધો, k=k+1 મૂકો અને પગલું 1 પર જાઓ.
પગલું 3 X * = X k, f * = f(X k) મૂકીને ગણતરીઓ પૂર્ણ કરો.
કાર્યને ઓછું કરો
f(x)=x 1 2 +4x 2 2 -6x 1 -8x 2 +13; (2.28)
ચાલો પહેલા સમસ્યા હલ કરીએ ક્લાસિકપદ્ધતિ ચાલો રજૂ કરતી સમીકરણોની સિસ્ટમ લખીએ જરૂરી શરતોબિનશરતી અંતિમ

તેને હલ કર્યા પછી, અમે સ્થિર બિંદુ X*=(3;1) મેળવીએ છીએ. આગળ, ચાલો એક્ઝેક્યુશન તપાસીએ પૂરતી સ્થિતિ, જેના માટે આપણે બીજા ડેરિવેટિવ્ઝનું મેટ્રિક્સ શોધીએ છીએ
કારણ કે, સિલ્વેસ્ટર માપદંડ મુજબ, આ મેટ્રિક્સ " માટે હકારાત્મક ચોક્કસ છે, પછી મળેલ બિંદુ X* એ ફંક્શન f(X) નો ન્યૂનતમ બિંદુ છે. લઘુત્તમ મૂલ્ય f *=f(X*)=0. આ સમસ્યાનો ચોક્કસ ઉકેલ છે (11).
ચાલો પદ્ધતિનું એક પુનરાવર્તન કરીએ ઢાળ વંશમાટે (2.28). ચાલો પ્રારંભિક બિંદુ X 0 =(1;0) પસંદ કરીએ, પ્રારંભિક પગલું a=1 અને પરિમાણ l=0.5 સેટ કરીએ. ચાલો f(X 0)=8 ની ગણતરી કરીએ.
ચાલો બિંદુ X 0 પર ફંક્શન f(X) નો ઢાળ શોધીએ
(X 0)= = (2.29)
ચાલો તેના કોઓર્ડિનેટ્સની ગણતરી કરીને નવા બિંદુ X=X 0 -a· (X 0) ને વ્યાખ્યાયિત કરીએ
x 1 = 
x 2 =  (2.30)
(2.30)
ચાલો f(X)= f(X 0 -a· (X 0))=200 ની ગણતરી કરીએ. f(X)>f(X 0) થી, અમે a=a·l=1·0.5=0.5 એમ ધારીને સ્ટેપને વિભાજિત કરીએ છીએ. અમે સૂત્રો (2.30) x 1 =1+4a=3 નો ઉપયોગ કરીને ફરીથી ગણતરી કરીએ છીએ; x 2 =8a=4 અને મૂલ્ય f(X)=39 શોધો. ફરી f(X)>f(X 0) હોવાથી, અમે a=a·l=0.5·0.5=0.25 સેટ કરીને સ્ટેપનું કદ વધુ ઘટાડીએ છીએ. અમે કોઓર્ડિનેટ્સ x 1 =1+4·0.25=2 સાથે નવા બિંદુની ગણતરી કરીએ છીએ; x 2 =8·0.25=2 અને આ બિંદુએ ફંક્શનની કિંમત f(X)=5. f(X) ઘટાડવા માટેની સ્થિતિ ચાલો પદ્ધતિનો ઉપયોગ કરીને એક પુનરાવર્તન કરીએ સૌથી ઊભો વંશ(2.28) માટે સમાન પ્રારંભિક બિંદુ X 0 =(1;0) સાથે. પહેલેથી જ મળેલા ઢાળ (2.29) નો ઉપયોગ કરીને, આપણે શોધીએ છીએ X= X 0 -a· (X 0) અને ફંક્શન j 0 (a)=f(X 0 -a· (X 0))=(4a-2) 2 +4(8a-1) 2 બનાવો. જરૂરી શરતનો ઉપયોગ કરીને તેને ઓછું કરીને j 0 ¢(a)=8·(4a - 2)+64·(8a - 1)=0 આપણે સ્ટેપ સાઈઝ a 0 =5/34 નું શ્રેષ્ઠ મૂલ્ય શોધીએ છીએ. લઘુત્તમ ક્રમનું બિંદુ નક્કી કરવું X 1 = X 0 -a 0 · (X 0) બિંદુ પર વિભેદક કાર્ય f(x) નો ઢાળ એક્સકહેવાય છે n-પરિમાણીય વેક્ટર f(x)
, જેના ઘટકો ફંક્શનના આંશિક ડેરિવેટિવ્ઝ છે f(x),બિંદુ પર ગણતરી એક્સ, એટલે કે f"(x ) = (df(x)/ડીએચ 1 , …, df(x)/ડીએક્સ એન) ટી. આ વેક્ટર બિંદુ દ્વારા પ્લેન પર લંબ છે એક્સ, અને ફંક્શનની લેવલ સપાટીની સ્પર્શક f(x),એક બિંદુમાંથી પસાર થવું એક્સ.આવી સપાટીના દરેક બિંદુ પર કાર્ય f(x)સમાન મૂલ્ય લે છે. ફંક્શનને વિવિધ સ્થિર મૂલ્યો C 0 , C 1 , ... સાથે સમાન કરીને, અમે તેની ટોપોલોજી (ફિગ. 2.8) ને દર્શાવતી સપાટીઓની શ્રેણી મેળવીએ છીએ. ગ્રેડિયન્ટ વેક્ટર આપેલ બિંદુ પર કાર્યમાં સૌથી ઝડપી વધારોની દિશામાં નિર્દેશિત થાય છે. ઢાળની વિરુદ્ધ વેક્ટર (-f'(x))
, કહેવાય છે વિરોધી ઢાળઅને કાર્યમાં સૌથી ઝડપી ઘટાડાની દિશામાં નિર્દેશિત થાય છે. ન્યૂનતમ બિંદુ પર, કાર્યનો ઢાળ શૂન્ય છે. પ્રથમ ક્રમની પદ્ધતિઓ, જેને ઢાળ અને લઘુત્તમ પદ્ધતિઓ પણ કહેવાય છે, તે ઢાળના ગુણધર્મો પર આધારિત છે. સામાન્ય કિસ્સામાં આ પદ્ધતિઓનો ઉપયોગ કરવાથી તમે કાર્યનો સ્થાનિક લઘુત્તમ બિંદુ નક્કી કરી શકો છો. દેખીતી રીતે, જો ત્યાં કોઈ વધારાની માહિતી નથી, તો પછી પ્રારંભિક બિંદુથી એક્સમુદ્દા પર જવાનું વાજબી છે એક્સ, એન્ટિગ્રેડિયન્ટની દિશામાં પડેલો - કાર્યનો સૌથી ઝડપી ઘટાડો. વંશની દિશા તરીકે પસંદ કરી રહ્યા છીએ આર[k] વિરોધી ઢાળ - f'(x[કે] )
બિંદુ પર એક્સ[k], અમે ફોર્મની પુનરાવર્તિત પ્રક્રિયા મેળવીએ છીએ X[ k+ 1] = x[k]-a k f"(x[કે] )
,
અને k > 0; k=0, 1, 2, ... સંકલન સ્વરૂપમાં, આ પ્રક્રિયા નીચે મુજબ લખાયેલ છે: x i [ k+1]=x i[k] - a kf(x[કે] )
/x i i = 1, ..., n; k= 0, 1, 2,... પુનરાવર્તિત પ્રક્રિયાને રોકવા માટેના માપદંડ તરીકે, કાં તો દલીલના નાના વધારાની શરતની પરિપૂર્ણતા || x[k+l] -x[k] || <= e
,
либо выполнение условия малости градиента || f'(x[k+l] )
|| <= g
, અહીં e અને g નાની માત્રામાં આપવામાં આવે છે. એક સંયુક્ત માપદંડ પણ શક્ય છે, જેમાં ઉલ્લેખિત શરતોની એક સાથે પરિપૂર્ણતાનો સમાવેશ થાય છે. તેઓ જે રીતે પગલાનું કદ પસંદ કરે છે તે રીતે ગ્રેડિયન્ટ પદ્ધતિઓ એકબીજાથી અલગ પડે છે અને k. સતત પગલાં સાથેની પદ્ધતિમાં, તમામ પુનરાવર્તનો માટે ચોક્કસ સ્થિર પગલું મૂલ્ય પસંદ કરવામાં આવે છે. એકદમ નાનું પગલું અને kખાતરી કરશે કે કાર્ય ઘટે છે, એટલે કે, અસમાનતા f(x[ k+1])
= f(x[કે] - a k f’(x[કે] ))
< f(x[કે] )
. જો કે, આ લઘુત્તમ બિંદુ સુધી પહોંચવા માટે અસ્વીકાર્ય રીતે મોટી સંખ્યામાં પુનરાવર્તનો હાથ ધરવાની જરૂરિયાત તરફ દોરી શકે છે. બીજી બાજુ, એક પગલું જે ખૂબ મોટું છે તે કાર્યમાં અણધારી વધારો કરી શકે છે અથવા લઘુત્તમ બિંદુ (સાયકલિંગ) ની આસપાસ ઓસિલેશન તરફ દોરી શકે છે. પગલાના કદને પસંદ કરવા માટે જરૂરી માહિતી મેળવવાની મુશ્કેલીને કારણે, સતત પગલાં સાથેની પદ્ધતિઓનો વ્યવહારમાં ભાગ્યે જ ઉપયોગ થાય છે. ઢાળવાળી રાશિઓ પુનરાવર્તનોની સંખ્યા અને વિશ્વસનીયતાના સંદર્ભમાં વધુ આર્થિક છે. ચલ પગલાં પદ્ધતિઓ,જ્યારે, ગણતરીના પરિણામોના આધારે, પગલાનું કદ અમુક રીતે બદલાય છે. ચાલો વ્યવહારમાં ઉપયોગમાં લેવાતી આવી પદ્ધતિઓના પ્રકારોને ધ્યાનમાં લઈએ. દરેક પુનરાવૃત્તિ પર સૌથી ઊંચો વંશ પદ્ધતિનો ઉપયોગ કરતી વખતે, પગલાનું કદ અને kફંક્શનની ન્યૂનતમ સ્થિતિમાંથી પસંદ કરવામાં આવે છે f(x)વંશની દિશામાં, એટલે કે. આ સ્થિતિનો અર્થ એ છે કે એન્ટિગ્રેડિયન્ટ સાથેની હિલચાલ કાર્યના મૂલ્ય સુધી થાય છે f(x)ઘટે છે. ગાણિતિક દૃષ્ટિકોણથી, દરેક પુનરાવૃત્તિ પર તે મુજબ એક-પરિમાણીય લઘુત્તમીકરણની સમસ્યાને હલ કરવી જરૂરી છે. એકાર્યો સ્ટીપ ડિસેન્ટ પદ્ધતિનું અલ્ગોરિધમ નીચે મુજબ છે. 1. પ્રારંભિક બિંદુના કોઓર્ડિનેટ્સ સેટ કરો એક્સ.
2. બિંદુ પર એક્સ[k],
k = 0, 1, 2, ... ગ્રેડિયન્ટ મૂલ્યની ગણતરી કરે છે f'(x[k])
. 3. પગલાનું કદ નક્કી કરવામાં આવે છે a k, એક-પરિમાણીય લઘુત્તમીકરણ દ્વારા એકાર્યો જે (a) = f(x[k]-af"(x[k])).
4. બિંદુના કોઓર્ડિનેટ્સ નક્કી કરવામાં આવે છે એક્સ[k+ 1]: x i [ k+ 1]= x i[k]- a k f' i (x[k]), i = 1,..., p. 5. સ્ટીરેશન પ્રક્રિયાને રોકવા માટેની શરતો તપાસવામાં આવે છે. જો તેઓ પૂરા થાય, તો ગણતરીઓ અટકી જાય છે. નહિંતર, પગલું 1 પર જાઓ. વિચારણા હેઠળની પદ્ધતિમાં, બિંદુથી ચળવળની દિશા એક્સ[k] બિંદુ પર સ્તર રેખાને સ્પર્શે છે x[k+ 1] (ફિગ. 2.9). વંશનો માર્ગ વાંકોચૂંકો છે, જેમાં અડીને આવેલા ઝિગઝેગ એકબીજા સાથે ઓર્થોગોનલ લિંક્સ છે. ખરેખર, એક પગલું a k ને નાનું કરીને પસંદ કરવામાં આવે છે એકાર્યો? (a) = f(x[કે] -af"(x[k]))
. કાર્યના ન્યૂનતમ માટે જરૂરી શરત ડી j (a)/da = 0.જટિલ કાર્યના વ્યુત્પન્નની ગણતરી કર્યા પછી, અમે પડોશી બિંદુઓ પર વંશ દિશાઓના વેક્ટરની ઓર્થોગોનાલિટી માટેની સ્થિતિ મેળવીએ છીએ: ડીજે (a)/da = -f’(x[k+ 1]f'(x[k])
= 0.
સરળ બહિર્મુખ કાર્યો માટે ગ્રેડિયન્ટ પદ્ધતિઓ ઉચ્ચ ઝડપે (ભૌમિતિક પ્રગતિની ગતિ) પર ન્યૂનતમ પર એકરૂપ થાય છે. આવા કાર્યો સૌથી મહાન છે એમઅને ઓછામાં ઓછું mબીજા ડેરિવેટિવ્ઝના મેટ્રિક્સના ઇજેન મૂલ્યો (હેસિયન મેટ્રિક્સ) એકબીજાથી થોડું અલગ છે, એટલે કે મેટ્રિક્સ N(x)સારી રીતે કન્ડિશન્ડ. યાદ કરો કે eigenvalues l i, i
=1, …, n, મેટ્રિસીસ એ લાક્ષણિક સમીકરણના મૂળ છે જો કે, વ્યવહારમાં, એક નિયમ તરીકે, વિધેયોને ઘટાડી દેવામાં આવે છે તેમાં બીજા ડેરિવેટિવ્ઝના અયોગ્ય મેટ્રિસિસ હોય છે. (t/m<<
1). કેટલીક દિશાઓ સાથેના આવા કાર્યોના મૂલ્યો અન્ય દિશાઓની તુલનામાં ખૂબ ઝડપથી (ક્યારેક તીવ્રતાના કેટલાક ઓર્ડર દ્વારા) બદલાય છે. સરળ કેસમાં તેમની સ્તરની સપાટીઓ મજબૂત રીતે વિસ્તરેલી હોય છે (ફિગ. 2.10), અને વધુ જટિલ કિસ્સાઓમાં તેઓ વળાંક અને કોતરો જેવા દેખાય છે. આવા ગુણધર્મો સાથેના કાર્યો કહેવામાં આવે છે ખાડીઆ કાર્યોના એન્ટિગ્રેડિયન્ટની દિશા (જુઓ. ફિગ. 2.10) દિશાથી લઘુત્તમ બિંદુ સુધી નોંધપાત્ર રીતે વિચલિત થાય છે, જે સંપાતની ગતિમાં મંદી તરફ દોરી જાય છે. ઢાળ પદ્ધતિઓનો કન્વર્જન્સ દર પણ ગ્રેડિયન્ટ ગણતરીઓની ચોકસાઈ પર નોંધપાત્ર રીતે આધાર રાખે છે. ચોકસાઈની ખોટ, જે સામાન્ય રીતે ન્યૂનતમ બિંદુઓની નજીકમાં અથવા ગલીની પરિસ્થિતિમાં થાય છે, તે સામાન્ય રીતે ગ્રેડિએન્ટ ડિસેન્ટ પ્રક્રિયાના કન્વર્જન્સને વિક્ષેપિત કરી શકે છે. ઉપરોક્ત કારણોને લીધે, સમસ્યાને ઉકેલવાના પ્રારંભિક તબક્કે ઢાળ પદ્ધતિઓનો ઉપયોગ અન્ય, વધુ અસરકારક પદ્ધતિઓ સાથે સંયોજનમાં થાય છે. આ કિસ્સામાં, બિંદુ એક્સલઘુત્તમ બિંદુથી દૂર છે, અને એન્ટિગ્રેડિયન્ટની દિશામાં પગલાઓ કાર્યમાં નોંધપાત્ર ઘટાડો પ્રાપ્ત કરવાનું શક્ય બનાવે છે. ઉપર ચર્ચા કરેલ ગ્રેડિયન્ટ પદ્ધતિઓ સામાન્ય કિસ્સામાં ફંકશનનો ન્યૂનતમ બિંદુ ફક્ત અનંત સંખ્યામાં પુનરાવર્તનોમાં જ શોધે છે. સંયોજક ઢાળ પદ્ધતિ શોધ દિશાઓ જનરેટ કરે છે જે કાર્યની ભૂમિતિને ઘટાડી દેવામાં આવે છે તેની સાથે વધુ સુસંગત હોય છે. આ તેમના કન્વર્જન્સની ઝડપમાં નોંધપાત્ર વધારો કરે છે અને ઉદાહરણ તરીકે, ચતુર્ભુજ કાર્યને ઘટાડવા માટે પરવાનગી આપે છે. f(x) = (x, Hx) + (b, x) + a સપ્રમાણ હકારાત્મક ચોક્કસ મેટ્રિક્સ સાથે એનપગલાંઓની મર્યાદિત સંખ્યામાં પી,ફંક્શન ચલોની સંખ્યા જેટલી. ન્યૂનતમ બિંદુની નજીકમાં કોઈપણ સરળ કાર્યને ચતુર્ભુજ કાર્ય દ્વારા સારી રીતે અંદાજિત કરી શકાય છે, તેથી બિન-ક્વાડ્રેટિક કાર્યોને ઘટાડવા માટે સંયોજક ઢાળ પદ્ધતિઓનો સફળતાપૂર્વક ઉપયોગ થાય છે. આ કિસ્સામાં, તેઓ મર્યાદિત થવાનું બંધ કરે છે અને પુનરાવર્તિત બને છે. વ્યાખ્યા દ્વારા, બે n-પરિમાણીય વેક્ટર એક્સઅને ખાતેકહેવાય છે સંયોજિતમેટ્રિક્સ સંબંધિત એચ(અથવા એચ-સંયુક્ત), જો સ્કેલર ઉત્પાદન (x, સારું) = 0.અહીં એન -કદનું સપ્રમાણ હકારાત્મક ચોક્કસ મેટ્રિક્સ પીએક્સ પી. કન્જુગેટ ગ્રેડિયન્ટ પદ્ધતિઓમાં સૌથી નોંધપાત્ર સમસ્યાઓ પૈકીની એક કાર્યક્ષમ રીતે દિશાઓ બાંધવાની સમસ્યા છે. ફ્લેચર-રીવ્ઝ પદ્ધતિ દરેક પગલા પર એન્ટિગ્રેડિયન્ટને રૂપાંતરિત કરીને આ સમસ્યાને હલ કરે છે -f(x[k])
દિશામાં પી[k],
એચ- અગાઉ મળેલી દિશાઓ સાથે સંયોજિત કરો આર, આર, ..., આર[k-1]. ચાલો આપણે સૌપ્રથમ લઘુત્તમ સમસ્યાના સંબંધમાં આ પદ્ધતિને ધ્યાનમાં લઈએ. ચતુર્ભુજ કાર્ય આર[kદિશાઓ ] ની ગણતરી સૂત્રો દ્વારા કરવામાં આવે છે: k] = -f'(x[k])
p[ પી[k+b k-1 k>= 1; -l], p = -’(x)
. f k b મૂલ્યો પી[k], આર[k-1 પસંદ કરવામાં આવે છે જેથી દિશાઓ એચ-1] હતા :
(પી[k], -સંયુક્ત[એચપી 1])= 0.
k- પરિણામે, ચતુર્ભુજ કાર્ય માટે પુનરાવર્તિત લઘુત્તમ પ્રક્રિયા ફોર્મ ધરાવે છે k+l] x[[k]=x[k], +a k પી આર[k] -
જ્યાં એચપીમાટે વંશની દિશા m પગલું;અને k - પગલું કદ. બાદમાં ફંક્શનની ન્યૂનતમ સ્થિતિમાંથી પસંદ કરવામાં આવે છે f(x) એદ્વારા f(x[ k] + ચળવળની દિશામાં, એટલે કે એક-પરિમાણીય લઘુત્તમ સમસ્યાને હલ કરવાના પરિણામે:[k])
= f(x[k] + a k આર [k])
. ar ચતુર્ભુજ કાર્ય માટે ફ્લેચર-રીવ્સ કન્જુગેટ ગ્રેડિયન્ટ પદ્ધતિનું અલ્ગોરિધમ નીચે મુજબ છે. એક્સ 1. બિંદુ પર પી = -f'(x)
. ગણતરી કરેલ એચપી 2. ચાલુ એ m પગલું, ઉપરોક્ત સૂત્રોનો ઉપયોગ કરીને, પગલું નક્કી કરવામાં આવે છે .
k એક્સ[k+ 1]. અને સમયગાળો f(x[k+1])
3. મૂલ્યોની ગણતરી કરવામાં આવે છે f'(x[k+1])
. અને f'(x)
4. જો એક્સ[k= 0, પછી બિંદુ +1] એ ફંક્શનનો ન્યૂનતમ બિંદુ છે f(x). પી[kનહિંતર, નવી દિશા નક્કી થાય છે +l] સંબંધમાંથી પીઅને આગામી પુનરાવર્તનમાં સંક્રમણ હાથ ધરવામાં આવે છે. આ પ્રક્રિયા લઘુત્તમ ક્વાડ્રેટિક ફંક્શનને વધુમાં શોધી શકશે નહીં પગલાં.જ્યારે બિન-ચતુર્ભુજ કાર્યોને ઘટાડી રહ્યા હોય, ત્યારે ફ્લેચર-રીવ્ઝ પદ્ધતિ મર્યાદિતમાંથી પુનરાવર્તિત બને છે. આ કિસ્સામાં, પછી એક્સ(p+ એક્સ[પી 1) પ્રક્રિયા 1-4 ની પુનરાવૃત્તિ ચક્રીય રીતે રિપ્લેસમેન્ટ સાથે પુનરાવર્તિત થાય છે પુનરાવર્તિત લઘુત્તમ પ્રક્રિયા ફોર્મ ધરાવે છે k+l] પર[k]=x[k],
] ની ગણતરી સૂત્રો દ્વારા કરવામાં આવે છે: k] +1] , અને ગણતરીઓ પર સમાપ્ત થાય છે, જ્યાં આપેલ સંખ્યા છે. આ કિસ્સામાં, પદ્ધતિમાં નીચેના ફેરફારનો ઉપયોગ થાય છે:[k])+
= x એચપી 1 પી[k+b k-1 k>= 1; = -f'(x x); f(x[ k] + b[k])
= f(x[k] p = -f’([k];
a k p +apઅહીં +apઆઈ - ઘણા સૂચકાંકો:= (0, n, 2 પી p, પગાર, ...) , એટલે કે પદ્ધતિ દર વખતે અપડેટ થાય છેપગલાં. એક્સભૌમિતિક અર્થ આર = કન્જુગેટ ગ્રેડિયન્ટ પદ્ધતિ નીચે મુજબ છે (ફિગ. 2.11). આપેલ પ્રારંભિક બિંદુથીવંશ દિશામાં હાથ ધરવામાં આવે છે એક્સ-f"(x ). બિંદુએઢાળ વેક્ટર નક્કી થાય છે એક્સદિશામાં કાર્યનો લઘુત્તમ બિંદુ છે આર,
તે f'(x)
ઓર્થોગોનલ થી વેક્ટર આર. પછી વેક્ટર મળે છે આર , એચ- સાથે જોડવું આર. આગળ, આપણે દિશા સાથે લઘુત્તમ કાર્ય શોધીએ છીએ આરવગેરે લઘુત્તમ સમસ્યાઓ ઉકેલવા માટે સંયુક્ત દિશા પદ્ધતિઓ સૌથી અસરકારક છે. જો કે, એ નોંધવું જોઇએ કે તેઓ ગણતરી પ્રક્રિયા દરમિયાન થતી ભૂલો પ્રત્યે સંવેદનશીલ હોય છે. મોટી સંખ્યામાં ચલો સાથે, ભૂલ એટલી વધી શકે છે કે ચતુર્ભુજ કાર્ય માટે પણ પ્રક્રિયાને પુનરાવર્તિત કરવી પડશે, એટલે કે તેના માટેની પ્રક્રિયા હંમેશા તેમાં બંધબેસતી નથી. પી p, પગાર, ...) સૌથી ઊંચો વંશ પદ્ધતિ (અંગ્રેજી સાહિત્યમાં "બેહદ વંશની પદ્ધતિ") એ ઑપ્ટિમાઇઝેશન સમસ્યાઓ હલ કરવા માટે પુનરાવર્તિત સંખ્યાત્મક પદ્ધતિ (પ્રથમ ક્રમ) છે, જે તમને ઉદ્દેશ્ય કાર્યની સીમા (ન્યૂનતમ અથવા મહત્તમ) નક્કી કરવાની મંજૂરી આપે છે: વિચારણા હેઠળની પદ્ધતિ અનુસાર, ઉદ્દેશ્ય કાર્યની સીમા (મહત્તમ અથવા લઘુત્તમ) કાર્યના સૌથી ઝડપી વધારો (ઘટાડા) ની દિશામાં નક્કી કરવામાં આવે છે, એટલે કે. કાર્યના ઢાળ (એન્ટિ-ગ્રેડિયન્ટ) ની દિશામાં. એક બિંદુ પર ગ્રેડિયન્ટ ફંક્શન જ્યાં i, j,…, n એ સંકલન અક્ષોની સમાંતર એકમ વેક્ટર છે. આધાર બિંદુ પર ઢાળ સૌથી ઊભો ઉતરવાની પદ્ધતિ છે વધુ વિકાસગ્રેડિયન્ટ ડિસેન્ટ પદ્ધતિ. સામાન્ય રીતે, ફંક્શનની સીમા શોધવાની પ્રક્રિયા એ પુનરાવર્તિત પ્રક્રિયા છે, જે નીચે પ્રમાણે લખાયેલ છે: જ્યાં "+" ચિહ્નનો ઉપયોગ મહત્તમ કાર્ય શોધવા માટે થાય છે, અને "-" ચિહ્નનો ઉપયોગ લઘુત્તમ કાર્ય શોધવા માટે થાય છે; એકમ દિશા વેક્ટર, જે સૂત્ર દ્વારા નક્કી થાય છે: એક સ્થિરાંક જે પગલાનું કદ નક્કી કરે છે અને તે તમામ i-th દિશાઓ માટે સમાન છે. ચળવળની દિશામાં લઘુત્તમ ઉદ્દેશ્ય ફંક્શન f(x) ની સ્થિતિમાંથી સ્ટેપનું કદ પસંદ કરવામાં આવે છે, એટલે કે, ઢાળ અથવા એન્ટિગ્રેડિયન્ટની દિશામાં એક-પરિમાણીય ઑપ્ટિમાઇઝેશન સમસ્યાને ઉકેલવાના પરિણામે: બીજા શબ્દોમાં કહીએ તો, પગલાનું કદ આ સમીકરણને હલ કરીને નક્કી કરવામાં આવે છે: આમ, ગણતરીનું પગલું એવી રીતે પસંદ કરવામાં આવે છે કે જ્યાં સુધી કાર્ય સુધરે નહીં ત્યાં સુધી ચળવળ હાથ ધરવામાં આવે છે, આમ અમુક બિંદુએ એક્સ્ટ્રીમમ સુધી પહોંચે છે. આ બિંદુએ, શોધ દિશા ફરીથી નિર્ધારિત કરવામાં આવે છે (ગ્રેડિયન્ટનો ઉપયોગ કરીને) અને ઉદ્દેશ્ય કાર્યનો એક નવો શ્રેષ્ઠ બિંદુ માંગવામાં આવે છે, વગેરે. આમ, આ પદ્ધતિમાં, શોધ મોટા પગલાઓમાં થાય છે, અને કાર્યના ઢાળની ગણતરી પોઈન્ટની નાની સંખ્યામાં થાય છે. બે ચલોના કાર્યના કિસ્સામાં આ પદ્ધતિનીચેની ભૌમિતિક અર્થઘટન ધરાવે છે: બિંદુ પરથી ચળવળની દિશા બિંદુ પરની સ્તર રેખાને સ્પર્શે છે. વંશનો માર્ગ વાંકોચૂંકો છે, અડીને ઝિગઝેગ એકબીજા સાથે ઓર્થોગોનલ લિંક્સ સાથે. પડોશી બિંદુઓ પર વંશ દિશાઓના વેક્ટરની ઓર્થોગોનાલિટી માટેની સ્થિતિ નીચેની અભિવ્યક્તિ દ્વારા લખાયેલ છે: ફંક્શન f(x) ના સમાન સ્તરની રેખાના ગ્રાફ પર દર્શાવવામાં આવેલ સૌથી ઊભો વંશ પદ્ધતિનો ઉપયોગ કરીને અંતિમ બિંદુ સુધીની હિલચાલનો માર્ગ પુનરાવર્તિત ગણતરીના પગલા (કેટલાક માપદંડો) પર શ્રેષ્ઠ ઉકેલની શોધ સમાપ્ત થાય છે: શોધ માર્ગ વર્તમાન શોધ બિંદુના નાના પડોશમાં રહે છે: ઉદ્દેશ્ય કાર્યનો વધારો બદલાતો નથી: સ્થાનિક લઘુત્તમ બિંદુ પર ઉદ્દેશ્ય કાર્યનો ઢાળ શૂન્ય બને છે: એ નોંધવું જોઈએ કે કોતર સાથે આગળ વધતી વખતે ઢાળવાળી વંશ પદ્ધતિ ખૂબ જ ધીમી હોય છે, અને જેમ જેમ ઉદ્દેશ્ય કાર્યમાં ચલોની સંખ્યા વધે છે તેમ તેમ પદ્ધતિનું આ વર્તન લાક્ષણિક બને છે. કોતર એ ડિપ્રેશન છે, જેની સ્તર રેખાઓ લગભગ અર્ધ-અક્ષો સાથે લંબગોળ આકાર ધરાવે છે જે ઘણી વખત અલગ પડે છે. કોતરની હાજરીમાં, ઉતરતા માર્ગ નાના પગલા સાથે ઝિગઝેગ લાઇનનું સ્વરૂપ લે છે, જેના પરિણામે લઘુત્તમ સુધી ઉતરવાની પરિણામી ગતિ ઘણી ધીમી થઈ જાય છે. આ એ હકીકત દ્વારા સમજાવવામાં આવ્યું છે કે આ કાર્યોના એન્ટિગ્રેડિયન્ટની દિશા દિશાથી લઘુત્તમ બિંદુ તરફ નોંધપાત્ર રીતે વિચલિત થાય છે, જે ગણતરીમાં વધારાના વિલંબ તરફ દોરી જાય છે. પરિણામે, અલ્ગોરિધમ કોમ્પ્યુટેશનલ કાર્યક્ષમતા ગુમાવે છે. ગલી કાર્ય ઢાળ પદ્ધતિ, તેના ઘણા ફેરફારો સાથે, વ્યાપક છે અને અસરકારક પદ્ધતિઅભ્યાસ હેઠળના ઑબ્જેક્ટ્સની શ્રેષ્ઠ શોધ. ગ્રેડિયન્ટ શોધનો ગેરલાભ (તેમજ ઉપર ચર્ચા કરેલી પદ્ધતિઓ) એ છે કે તેનો ઉપયોગ કરતી વખતે, ફંક્શનની માત્ર સ્થાનિક સીમા શોધી શકાય છે. બીજાને શોધવા માટે સ્થાનિક ચરમસીમાઓઅન્ય પ્રારંભિક બિંદુઓથી શોધ કરવી જરૂરી છે. કન્વર્જન્સની ગતિ પણ ઢાળ પદ્ધતિઓઢાળની ગણતરીઓની ચોકસાઈ પર પણ નોંધપાત્ર રીતે આધાર રાખે છે. ચોકસાઈની ખોટ, જે સામાન્ય રીતે ન્યૂનતમ બિંદુઓની નજીકમાં અથવા ગલીની પરિસ્થિતિમાં થાય છે, તે સામાન્ય રીતે ગ્રેડિએન્ટ ડિસેન્ટ પ્રક્રિયાના કન્વર્જન્સને વિક્ષેપિત કરી શકે છે. ગણતરી પદ્ધતિ 1મું પગલું:કાર્યના ઢાળની ગણતરી કરવા માટે વિશ્લેષણાત્મક અભિવ્યક્તિઓ (પ્રતિકાત્મક સ્વરૂપમાં) ની વ્યાખ્યા પગલું 2: પ્રારંભિક અંદાજ સેટ કરો પગલું 3:છેલ્લી શોધ દિશાને ફરીથી સેટ કરવા માટે અલ્ગોરિધમિક પ્રક્રિયાને પુનઃપ્રારંભ કરવાની જરૂરિયાત નક્કી કરવામાં આવે છે. પુનઃપ્રારંભના પરિણામે, શોધ ફરીથી ઝડપી વંશની દિશામાં હાથ ધરવામાં આવે છે.
 .
.
f(x[k]-a k f'(x[k]))
= f(x[કે] - af"(x[k]))
.
j (a) = f(x[k]-af"(x[k]))
.




![]() ,
,![]()
 .
.
![]() વાસ્તવિક ડોમેન પર ફંક્શન દલીલ (નિયંત્રિત પરિમાણો) ના મૂલ્યો છે.
વાસ્તવિક ડોમેન પર ફંક્શન દલીલ (નિયંત્રિત પરિમાણો) ના મૂલ્યો છે.![]() એક વેક્ટર છે જેના કોઓર્ડિનેટ અક્ષો પરના અંદાજો કોઓર્ડિનેટના સંદર્ભમાં ફંક્શનના આંશિક ડેરિવેટિવ્ઝ છે:
એક વેક્ટર છે જેના કોઓર્ડિનેટ અક્ષો પરના અંદાજો કોઓર્ડિનેટના સંદર્ભમાં ફંક્શનના આંશિક ડેરિવેટિવ્ઝ છે:![]() સપાટી પર સખત રીતે ઓર્થોગોનલ છે, અને તેની દિશા કાર્યમાં સૌથી ઝડપી વૃદ્ધિની દિશા બતાવે છે, અને વિરુદ્ધ દિશા (એન્ટિગ્રેડિયન્ટ), અનુક્રમે, કાર્યના સૌથી ઝડપી ઘટાડાની દિશા દર્શાવે છે.
સપાટી પર સખત રીતે ઓર્થોગોનલ છે, અને તેની દિશા કાર્યમાં સૌથી ઝડપી વૃદ્ધિની દિશા બતાવે છે, અને વિરુદ્ધ દિશા (એન્ટિગ્રેડિયન્ટ), અનુક્રમે, કાર્યના સૌથી ઝડપી ઘટાડાની દિશા દર્શાવે છે.

![]() - ગ્રેડિયન્ટ મોડ્યુલ ગ્રેડિયન્ટ અથવા એન્ટી-ગ્રેડિયન્ટની દિશામાં ફંક્શનના વધારા અથવા ઘટાડાનો દર નક્કી કરે છે:
- ગ્રેડિયન્ટ મોડ્યુલ ગ્રેડિયન્ટ અથવા એન્ટી-ગ્રેડિયન્ટની દિશામાં ફંક્શનના વધારા અથવા ઘટાડાનો દર નક્કી કરે છે:
![]()
![]()

![]()









