Federālā izglītības aģentūra
Valsts izglītības iestāde augstākā profesionālā izglītība
“MATI” – Krievijas Valsts tehnoloģiskā universitāte, kas nosaukta K.E. Ciolkovskis
katedra “Mašīnu un mehānismu mehānika”
IESAISTĪTO ZARĪBU PROFILĒŠANA
Vadlīnijas kursa izstrādei “Mehānismu un mašīnu teorija”
Sastādītājs: Gatsenko A.A. Šuvalova L.S.
Maskava 2006
Andrejs Aleksandrovičs Gacenko Ludmila Sergejevna Šuvalova
IESAISTĪTO ZARĪBU PROFILĒŠANA
METODOLOĢISKIE NORĀDĪJUMI
Uz kursa dizains kursam<<Теория механизмов и машин>>
Redaktors M.A. Sokolova
Parakstīts drukāšanai Apjoms 1,25 lpp. Tirāža 150 eks. Pasūtījums Nr
Rotaprint MATI-RGTU, Bernikovskaya krastmala, 14
PIEŅEMTIE VĒRTĪBU APZĪMĒJUMI UN IZMĒRI______ 4
1. VISPĀRĪGI NORĀDĪJUMI _______________________________________________________ 5
1.1. SĀKUMA DATI ________________________________________5
1.2. DARBĪBAS KĀRTĪBA __________________________________________ 5
2. CILINDRIKAS ĢEOMETRISKO PARAMETRU APRĒĶINS
SKY IESAISTĪTI ĀRĒJĀS SAVIENOŠANAS REZULTĀTI
Pētniecības institūts _________________________________________________________________ 6 2.1. APRĒĶINA PAREIZĪBAS PĀRBAUDE____________________8
3. DIVU ZONU IEROBEŽOJUMA KONSTRUKCIJA
MEŽS______________________________________________________________________9
4. MAŠĪNAS DARBĪBAS IZBŪVE____________________15
4.1. SĀKOTNĒJĀS RAŽOŠANAS KONTROLES IZBŪVE
REIKI ________________________________________________________________________15
4.2. SĀKOTNĒJĀ RAŽOŠANAS PLATĪTĀJA POZĪCIJAS NOTEIKŠANA ATTIECĪBĀ ATTIECĪBĀ UZ GRIEZAMĀ RITEŅA __________________15
4.3. IZGRIEZTĀ CO-CENTRA POZĪCIJAS NOTEIKŠANA
MEŽI________________________________________________________________________16
4.4. TĪCIJAS IZBŪVE PN__________________16
4.5. KREISĀ ZOBA PROFILA KONSTRUKCIJA______ 16
4.6. PAREIZĀ ZOBA PROFILA KONSTRUKCIJA_____17
4.7. ZOBA PĀREJAS LĪKNES KONSTRUKCIJA__________________17
LITERATŪRA_____________________________________________________18
PIEŅEMTIE VĒRTĪBU ATZĪMĒJUMI UN IZMĒRI
m – saslēgšanās modulis, mm Z 1 – zobrata zobu skaits Z 2 – riteņa zobu skaits
Z 1 min – minimālais zobrata zobu skaits, kas nogriezts bez apakšgriešanasβ – zoba slīpuma leņķis, grādi
P – zobrata zoba solis, mm
α W – centra attālums, mm
r in 1,r in 2 – zobrata un riteņa galveno apļu rādiusi, mm r w 1,r w 2 – zobrata un riteņa sākotnējo apļu rādiusi, mm r 1, r 2 – slīdņa soļa apļu rādiusi. zobrats un ritenis, mm r a 1,r a 2 – zobrata un riteņa virsotņu apļu rādiusi, mm
r f 1 ,r f 2 – zobratu un riteņu dobumu apļu rādiusi, mm ρ un – zoba kāta noapaļošanas rādiuss, mm
h – zobrata vai riteņa zoba augstums, mm H PC – kopējais zobrata zoba augstums, mm
S – zobrata zoba soļa biezums, mm
S 1 , S 2 – zobu biezums pa zobrata un riteņa soļa apļa loku, mm
S а1,S а2 – zobu biezums pa zobrata un riteņa virsotņu apļa loku, mm
P 1X, P 2X – zobu soļi gar zobrata un riteņa soļa apļa hordu, mm
α - profila leņķis, kas ir normāls sākotnējai kontūrai, deg α t – sākotnējā profila gala profila leņķis, gr
α W1 ,α W2 – pārnesumu un riteņu ieslēgšanas leņķi, grādi
τ 1, τ 2 – zobrata un riteņa leņķisko zobu soļi, grādi X 1 – zobrata pārvietojuma koeficients
X 2 – riteņu pārvietojuma koeficients
X 1 min – minimālais pārvietojuma koeficients, griežot zobratu C* – oriģinālās kontūras normāls radiālās klīrensa koeficients C* t – sākotnējās kontūras radiālās atstarpes koeficients
y – izlīdzināšanas nobīdes koeficients
h* a – sākotnējās kontūras galvas augstuma koeficients
ε α – cilindriskā zobrata gala pārklāšanās koeficients ε β – spirālveida zobrata gala pārklāšanās koeficients ε γ – kopējais pārklāšanās koeficients λ 1 , λ 2 – zobrata un riteņa slīdes koeficienti υ – īpatnējais spiediena koeficients.
1. VISPĀRĪGI NORĀDĪJUMI.
Kursa projekta trešajā lapā par TMM tiek veikta evolūcijas zobrata projektēšana, kas satur aprēķinu un grafiskās daļas.
Aprēķinu daļa ietver ģeometrisko parametru noteikšanu zobratu riteņi un daži kvalitātes pārraides rādītāji.
Grafiskā daļa tiek veikta uz A1 formāta lapas. Šī kursa projekta daļa satur:
a) mašīnas pārnesuma ieslēgšanās ar plauktu; b) zobratu evolūcija.
1.1. Sākotnējie dati
1) Zobu zobratu skaits- Z 1 un riteņi -Z 2.
2) Modulis - m, mm.
3) Zobrata un zobrata instrumenta sākotnējās kontūras parametri saskaņā ar GOST
13755-81: α = 20°; h a * = 1; C* = 0,25; ρ un = 0,38 m,
kur α ir zobrata zoba profila leņķis;
h a * - galvas augstuma koeficients C * - radiālā klīrensa koeficients;
ρ un - izliekuma rādiuss, mm
1.2. Darbības procedūra
1) Aprēķināt ģeometriskos parametrus.
2) Konstruēt mašīnas zobratu un instrumentu zobratu
3) Konstruēt evolūcijas pārnesumu ieslēgšanu un zobrats.
4) Rādīt zoba profila aktīvās zonas uz saskarē esošo zobu sānu virsmām.
5) Pamatojoties grafiskā konstrukcija noteikt beigu pārklāšanās koeficientuε α un salīdziniet to ar aprēķināto ε α ras vērtību.:
εα | ε α− ε αras | 100% . |
|
εα |
|||
2. ĀRĒJĀS CILINRISKO IETIECINĀTO ZĀRU PĀRNESU ĢEOMETRISKO PARAMETRU APRĒĶINS
REZULTĀTI.
Izvēlieties pārvietojuma koeficientu X 1 un X 2 vērtību, ņemot vērā GOST 16532-70 ieteikumus jaudai zobrati. Šie ieteikumi ir parādīti 1. tabulā.
Jāievēro šāds nosacījums:
Nobīdes koeficients | Pielietojuma zona |
||
10 ≤ Z 1 ≤ 30 |
|||
Z 1 > 30 |
|||
Nosakiet saķeres leņķi α W
invα W = invα + | 2 (X 1+ X 2) | tgα. | |
Z 1+ Z 2 | |||
Profila evolūcijas leņķa vērtības inv α ir norādītas tabulā. 2.
2. tabula. Profila evolūcijas leņķa vērtība inv α.
inva | |||||||
inva | |||||||
inva | |||||||
inva | |||||||
Piezīme tabulai 2. Evolucionālā profila leņķa inv α starpvērtības tiek noteiktas ar lineāro interpolāciju.
Nosakiet uztverto nobīdes koeficientu
Z 1+ Z 2 | cosα | |||
− 1. |
||||
cosα W | ||||
Noteikt izlīdzināšanas novirzes koeficientu
y = (X1 + X2 ) − y.
Nosakiet galveno apļu rādiusus
r in 1,2= r 1, 2cos α
r W1 | |||||||||
u+1 |
|||||||||
r W2 | |||||||||
kur u = | |||||||||
Pārnesumu attiecība. |
|||||||||
Nosakiet riteņa augšējo apļu rādiusus
a 1, 2 | + (h * +X | − y)m |
|||
Nosakiet riteņu padziļinājumu apļu rādiusus
r f 1, 2 = r 1, 2− (h a * + C * - X 1, 2) m
Atrodiet riteņa zobu augstumu
h = m(2 ha * + C* - y)
Nosakiet zobu biezumu virsotnes aplī
tgα | ||||||||||
r 1.2 | ||||||||||
S a 1.2 | 2 r a 1.2 | Invα − invar ccos | ||||||||
a 1.2 | ||||||||||
Nosakiet pārraides gala pārklāšanās koeficientu
2 π1 | |||||||||||||||||
α a 1.2 | Arccos | r 1.2 | |||||||||||||||
r a 1.2 | |||||||||||||||||
Atrodiet leņķi starp centru līniju un zoba simetrijas asi
h 1,2= r a 1,2sin ϕ 1,2
Atrodiet leņķi starp blakus esošo zobu simetrijas asīm
Nosakiet attālumu starp centra līniju un simetrijas ass krustošanās punktu blakus esošais zobs ar virsotņu apli
h 1,2* = r a 1,2sin(γ 1,2− ϕ 1,2) |
2.1. Aprēķinu pareizības pārbaude
Nosakiet attālumu no centra līdz centram caur soļa apļu rādiusiem un salīdziniet to ar vērtību, kas iegūta vienādojumā (4)
Pārbaudiet, vai zobi nav uzasināti. Ieteicamais stāvoklis bez asināšanas attiecīgi zobratu un riteņu zobiem:
Sa1,2 ≥ 0,25m

3. DIVU RITEŅU IESAISTĪTAS SAVIENOŠANAS KONSTRUKCIJA
Aprēķinot visus galvenos zobratu izmērus, izmantojot formulas
(1)…(20), sāciet attēlot elementus zobrats. Konstrukcija tiek veikta loksnes kreisajā pusē pēc mēroga
3.1. Uzzīmējiet zobratu centru līniju, uz kuras tiek attēlots centra attālums izvēlētajā mērogā a W =O 1 O 2 (1. att.).
3.2. Apļus zīmē no centriem O 1 un O 2: sākotnējie apļi ar rādiusiem W1
un r W2, kas saskaras sloksnē pieskaras punktam P; dalītājs -r 1 un r 2, fundamentāls
virsotnes ir r in1 un r in2, virsotnes ir r a1 un r a2, apakšas ir r f1 un r f2.
Lai izvairītos no turpmākām kļūdām, jums jāpārbauda attālums starp viena riteņa augšdaļas apļiem un otra riteņa apakšām,
![]()
mērot pa centra līniju, t.i. radiālā klīrensa lielums, kam jābūt vienādam ar C*m.
3.3. Caur punktu P novelciet savienojuma līniju N 1 N 2, kas pieskaras galvenajiem apļiem punktos N 1 un N 2, lai tā būtu slīpa pret piedziņas zobrata griešanos. Parādiet saslēgšanās leņķi α W, izmantojot ieslēgšanās līniju un perpendikulāru kO 1 O 2, kas novilkts caur sasaistes stabu P. Taisnes līnijas N 1 O 1 un N 2 O 2 ir perpendikulāras savienojuma līnijai un arī veido leņķi, kas vienāds ar α W ar centru līniju O 1 O 2 .
H.4. Konstruēt evolūcijas riteņus, kas pieskaras pie zobrata staba P un ierobežo galvenie apļi - evolūcijas sākums - un virsotņu apļi - evolūcijas zoba profilu beigas (2. att.).
Pirmā riteņa evolūcija, ko apraksta ar taisnes NP punktu P, kad pēdējais ripo, neslīdot pa galveno apli, tiek konstruēts šādā secībā:
a) segments N 1 P ir sadalīts patvaļīgā skaitā vienādās daļās “a”. Šajā gadījumā, jo īsāks ir izvēlētais segmentu garums, jo precīzāk tas sakritīs ar loka garumu. Ieteicams segmentu N 1 P sadalīt trīs vienādās daļās. Apzīmēsim punktu N 1 ar skaitli “3”;
Jums būs nepieciešams
- - dators ar uzstādītu datorizētās projektēšanas sistēmu;
- - zīmēšanas instrumenti (raksti, lineāli, zīmuļi) zīmēšanai uz papīra;
- - pauspapīrs vai papīrs;
- - printeris vai ploteris zīmējuma drukāšanai (ja nepieciešams).
Instrukcijas
Izvēlieties materiālu, kas nepieciešams, lai aprēķinātu pārnesumu. Lai to izdarītu, jums būs nepieciešams teksts GOST 16532-70 par zobratu ģeometrijas aprēķināšanu. Varat izmantot citas uzziņu grāmatas, piemēram, īpašas grāmatasšādu pārskaitījumu aprēķināšanai, kurā būs norādītas nepieciešamās formulas.
Uzziniet sākotnējos datus, kas jums būs nepieciešami, lai pabeigtu zobrata rasējumu. Parasti, lai izveidotu sākotnējo zoba kontūru un zobrata attēlu, ir nepieciešami tādi parametri kā zobrata modulis un zobu skaits. Zobu sākotnējās kontūras izmēriem un formai jāatbilst GOST 13755-81.
Uzzīmējiet zobrata rasējumu, ievērojot noteikumus, kas izklāstīti GOST 2.403-75 un GOST 2.402-68. Parasti pietiek ar vienu veidu ar griezumu. Neaizmirstiet, ka zobrata attēlā jānorāda zobu galotņu diametrs, gredzenveida zobrata platums, zobu malu noapaļošanas rādiusi vai slīpuma izmēri, kā arī zobu sānu virsmu raupjums. Ja zobrats satur papildu konstrukcijas elementus (rievas, caurumus, padziļinājumus utt.), kas vienā skatā nav iespējami, uzzīmējiet papildu skatu.
Uz zīmējuma novietojiet zobrata gredzenveida zobratu parametru tabulu. Tabulai jāsastāv no trim daļām, kuras viena no otras atdala cieta galvenā līnija. Pirmajā daļā norādiet pamatdatus: moduli, zobu skaitu, parasto sākotnējo kontūru, nobīdes koeficientu, precizitātes pakāpi un pārošanās veidu. Nodrošiniet zoba oriģinālās kontūras attēlu ar nepieciešamajiem izmēriem, ja tā noteikšanai nepietiek ar tabulā norādītajiem parametriem. Tabulas otrajā daļā ievadiet datus, lai kontrolētu pretējo zobu profilu relatīvo stāvokli. Tabulas trešajā daļā norādiet zobrata soļa diametru un citus atskaites izmērus.
Lai noregulētu dalīto pārnesumu 16 vārstu VAZ-2110-2112 dzinējos, uzstādiet sadales vārpstas ar dalītiem pārnesumiem. Pamatojoties uz standarta pārnesumu atzīmēm, aptuveni iestatiet vārstu pārklāšanās. Pārvietojiet I un IV cilindra virzuļus uz TDC un uzlieciet zobsiksnu. Uzstādiet skalas indikatorus un to joslu (šie indikatori nosaka vārstu kustības un TDC pozīcijas). Pārmaiņus atrodiet IV cilindra izplūdes un ieplūdes vārstu aizvērtās (nulles) pozīcijas. Pēc tam, izmantojot dalītos pārnesumus un indikatorus, iestatiet ieplūdes un izplūdes vārstu pārklāšanos. Pievelciet sadalīto pārnesumu stiprinājuma skrūves. Salieciet dzinēju un veiciet testa braucienu.
Dalīto pārnesumu iestatīšana 8 vārstu klasiskajām VAZ automašīnām. Uzstādot sadales vārpstu ar dalītu pārnesumu, izmantojiet standarta pārnesuma atzīmes, lai aptuveni iestatītu vārstu pārklāšanās. Pārvietojiet I un IV cilindra virzuļus uz TDC un uzlieciet laika ķēdi. Uzstādiet ciparnīcas rādītājus tā, lai to kājas balstās uz svirām.
Pārmaiņus iestatot I cilindra vārstu aizvērtos stāvokļus un precīzu TDC pozīciju, iestatiet nepieciešamos vārstu pārlaidumus gar sadalīto pārnesumu. Neaizmirstiet par sviras pārnesumu skaitļiem un sviras punktu, kur atrodas indikators. Tas ļaus pielāgot griestus. Ja uzstādāt vienfāzes sadales vārpstu, vienkārši atrodiet tās nulles pozīciju (kad visi vārsti ir vienādi atvērti), neņemot vērā sviru reizinātāju vērtības. Nobloķējiet sadalīto pārnesumu, salieciet dzinēju un iedarbiniet to.
Pārnesums ir pārnesumkārbas mehānisma daļa, kas kalpo elektromotora jaudas pārvadīšanai uz darba mašīnu. Šos riteņus visbiežāk izmanto ar taisniem un slīpiem zobiem cilindriskajos un konusveida zobratos.

Instrukcijas
Lai veiktu taisni, tiek izmantoti zobrati ar taisniem zobiem rotācijas kustība piedziņas vārpsta uz piedziņas vārpstu. Ja šāda kustība tiek veikta jebkurā leņķī, tiek izmantoti slīpi vai konusveida zobrati, kuros zobam ir mainīgs modulis visā garumā.
Konisko zobrati ir novilkti pa sākotnējo lielo apļa diametru, tāpēc ieplakas netiek zīmētas galvenajā skatā.
Lai izveidotu zīmējumu, izmēriet un aprēķiniet visus zobrata elementus saskaņā ar GOST 9563-60. Nosakiet izvirzījumu ārējo diametru, zobus De, saķeres moduli t, sākotnējo apļa diametru d, soli t, zoba augstumu L, zoba galvas augstumu h", zoba kāta augstumu L", iekšējā apļa diametru Di, zoba biezumu s, dobuma platums se, darba riteņa platums b, rumbas garums 1X, vārpstas atveres diametrs dt, rumbas ārējais diametrs d2. Visi burtu apzīmējumi tiek pieņemti saskaņā ar OST VKS 8089.
Parasti zobu profilus zīmē vienkāršotā veidā, izmantojot apļveida lokus. Ar cietu galveno līniju novilkt apļus ar doto diametru De, d, Di. Izmantojot plānu līniju, uzvelciet papildu apli, pa kuru atrodas loki, kas iezīmē zoba profilu.
Parametru tabulā saskaņā ar GOST 9250-59, kas atrodas zīmējuma augšējā labajā stūrī, ievietojiet papildu informāciju par piesaistes moduli, zobu skaitu un slīpuma leņķi utt.
Video par tēmu
Piezīme
Tāpat saskaņā ar GOST 2.403-75 ESKD tiek uzzīmēta zobrata profila sekcija. Zīmējiet līnijas, kas norāda apļus un veido zobu izvirzījumu virsmas kā cietu galveno līniju. Līnijas, kas norāda padziļinājumu apli, ir punktētas līnijas. Neaizēnot zobus, kas iekrīt griezuma plaknē.
Zobratu popularitāte ir izskaidrojama ar to augsto efektivitāti, lielo kravnesību, mazajiem izmēriem, izturību, izturību, lietošanas ērtumu un uzticamību. Trūkumi ietver augstas prasības aprēķina un uzstādīšanas precizitātei.
Kad zobrats un ar to saistītais zobrats griežas, notiek pārsteidzoša, acij nemanāma lieta. Kad zobrata zoba un riteņa zoba sānu virsmas saskaras, slīdēšana gandrīz nenotiek! Zobrata zoba profils ruļļos...
Ar nelielu slīdēšanu gar riteņa zoba profilu!
Kāpēc un kā tas ir iespējams? Tā kā zobu darba virsmas ir evolūcijas cilindru sānu virsmas. Riteņa gals (precīzāk, zoba daļa) ir šī cilindra pamatne. Gala plaknes un iepriekšminētā cilindra krustpunkts ir līkne, ko sauc par evolūciju.
Mūsdienu zinātne spožo holandiešu zinātnieku Kristianu Huigensu uzskata par “evolūcijas un evolūcijas tēvu”. Haigenss atklāja (vai izveidoja) šo līkņu teoriju 1654. gadā.
Kad jums ir 17 gadi, 1654 šķiet neticami tālu. Bet šodien, kad esmu daudz vecāka, saprotu, ka mana vecmāmiņa, dzimusi 1892. gadā, bērnībā redzēja un dzirdēja vecus cilvēkus - Puškina laikabiedrus un pat, iespējams, Napoleonu - un no 21. gadsimta sākuma līdz pirmajam. puse no 19. jau “pie rokas”. Kāda man tuva cilvēka acis, kurās es daudzkārt skatījos, redzēja cilvēkus, kuri dzīvoja 19. gadsimta pirmajā pusē. Neticami! Un tur vēl tikpat daudz - Haigensa laiki...
Pārnesumu slīdēšanas samazināšana nodrošina ļoti augstu transmisijas efektivitāti un ievērojami samazinātu zobu profilu nodilumu, jo rites berzes koeficients ir vismaz par kārtu zemāks nekā slīdēšanas berzes koeficients.
Visi inženieri un matemātiķi zina, kā izveidot vienkāršu apļa evolūciju. Spriežot pēc interneta forumiem, tikai daži cilvēki zina, kā izveidot zoba profilu ar evolūciju un pārejas līkni.
Kam tas vajadzīgs un kāpēc?
Pirmkārt, mašīnbūves specialitāšu studentiem veikt kursa darbs par mehānismu un mašīnu teoriju.
Otrkārt, piedziņu un griezējinstrumentu dizaineriem.
Treškārt, plazmas griešanas, elektroerozijas un lāzera iekārtu zobratu ražotājiem.
Tā ir trešā grupa, kurai es ceru, ka tālāk sniegtais algoritms būs īpaši noderīgs.
Zobu profila punktu koordinātu aprēķināšana programmā Excel.
Lai veiktu apgrūtinošus un diezgan sarežģītus aprēķinus, mēs palaižam programmu MS Excel. Šo aprēķinu varat veikt arī programmā Calc no bezmaksas biroja pakotnēm Apache OpenOffice vai LibreOffice.
Priekš spirālveida riteņi profils ir konstruēts gala sekcijai.
Sākotnējie dati:
Zobu profilu “izgriezīsim” ar statīva instrumentu – ķemmi vai plīts griezēju. Mēs ņemsim sākotnējās ķēdes parametrus un koeficientus saskaņā ar GOST 13755-81. Apskatiet oriģinālās sliedes zīmējumu un saprotiet, kas tas ir.
Pirmie četri parametri šūnās D3-D6 raksturo sākotnējo kontūru.
Nākamie pieci sākotnējie dati šūnās D7-D11 ir pārnesuma “pase”, kas sniedz visaptverošu informāciju par to.
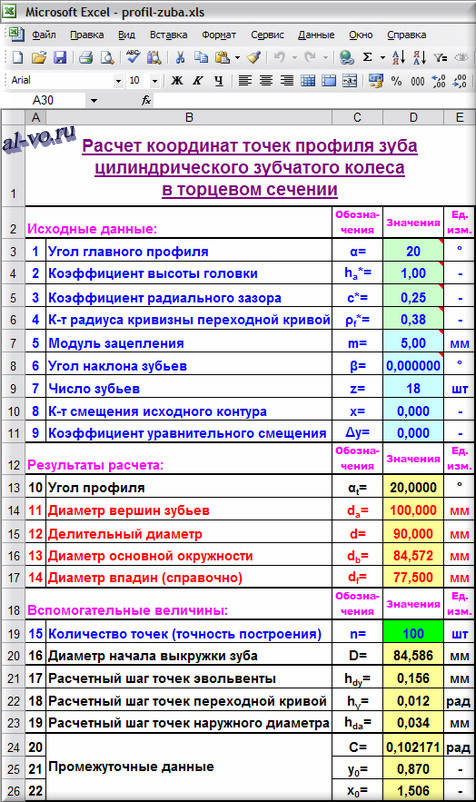
Aprēķinu algoritms:
Profila leņķa un visu diametru aprēķinu rezultāti tika iegūti, izmantojot šādas formulas:
10. α t =arctg(tg(α )/cos (β ))
11. d a = d +2* m *(h a * + x — Δ y )
12. d = m * z /cos(β )
13. d b = d *cos (α t )
14. d f = dA -2* m **(2*h a * +c* —Δ y)
Daļa no zoba profila ir galvenā apļa evolūcija ar diametru d b. Tādējādi evolūcija var pastāvēt zobratā no galvenā apļa diametra līdz zobu galu diametram!
Zoba profila otrā daļa ir pārejas līkne no evolūcijas līdz dobumu diametram.
Es izvēlējos punktu skaitu n katra no līknēm tā piemērā ir vienāda ar 100, uzskatot to par pietiekamu nepieciešamajai konstrukcijas precizitātei. Ja vēlaties to mainīt, jums būs attiecīgi jāpaplašina vai jāsamazina tabula “Zobu profila punktu koordinātes”, kurā ir 100 rindas ( i max = n).
Papildu konstantu rezultātus nosaka pēc formulas:
16. D =2*m *((z /(2*cos (β )) — (1-x )) 2 +((1-x )/tg (α t )) 2) 0,5
17. hdy =(d a -d b )/(n -1)
18.st γ =γ 1/(n -1)
19. stda =2*Xuh 1 /(n -1)
20. C=(π/2+2*x *tg (α ))/z +tg (α t ) — α t
21. g. 0=1- (ρ f * )* grēks (α t ) -x
22. x 0= π /(4*cos (β ))+(ρ f * )*cos (α t )+tg (α t )
Sagatavošana ir pabeigta, jūs varat aprēķināt starpdatus un tieši zobu profila punktu koordinātas programmā Excel.

Tabulā esošās vērtības tiek aprēķinātas, izmantojot šādas formulas:
d y1 = d a
d y (i+1) =d yi -h dy
d y (n) = d b
D i =arccos (d b /d yi ) -tg (arccos (d b /d yi ))+C
γ 1 =π/2-α t
γ (i+1) = γ i -h γ
A i =z /(2*cos(β )) - g 0 — (ρ f * )*cos (γ i )
B i =y 0 *tg(γ i ))+(ρ f * )* grēks (γ i)
φ i =(2*maks(β )/z )*(x 0 +y 0 *tg (γ i ))
Yuhi =(d yi /2)*cos (D i )
Xuhi =Yuhi *tg (D i )
YPCi =(A i *cos (φ i )+B i *sin (φ i ))*m
XPCi =(A i *sin (φ i ) -B i *cos (φ i ))*m
X da1 =-Xuh 1
X da (i+1) = X dai + hda
Y dai =((dA /2) 2 — X dai 2) 0,5
Kad aprēķins programmā Excel ir pabeigts, mēs palaižam diagrammas vedni un veidojam izkliedes diagrammas, izmantojot iegūtās koordinātas. Kā tas tiek darīts, ir sīki aprakstīts.

Iepriekš redzamajā ekrānuzņēmumā ārējais diametrs ir parādīts zilā krāsā, evolūcijas ir parādītas tumši zilā krāsā, un pārejas līknes ir parādītas purpursarkanā krāsā.
X un Y asis krustojas riteņa centrā - tas ir sākuma punkts.
Excel izveidoja zobu profilu! Problēma ir atrisināta.
Mainot sākotnējos datus, var acumirklī vizuāli novērtēt zoba profila izmaiņas un redzēt stumbra apgriešanu vai virsotnes asināšanu, pielietojot kontūras nobīdi.
Rezultāti.
Lai uzzīmētu pilnu reālo zobrata kontūru, jāņem viena zoba profila punktu koordinātas un, izmantojot šos punktus, jebkurā pieejamajā CAD programmā jākonstruē splains. Tad jums tas jāreizina pa apkārtmēru ar zobu skaitu, jāpabeidz dobumu diametrs un jāsaņem DXF zīmējums. Ar zīmējumu ir viegli uzrakstīt vadības programmu CNC mašīnai un izgatavot detaļu.
Daudzas CAD programmas var izveidot zobrata kontūras zīmējumu bez aprakstītajām darbībām, bet kontūra, diemžēl, vairumā gadījumu nebūs īsta!
Ir interesanta programma ar nosaukumu Gear Template Generator, kas ģenerē zobratu kontūru DXF failus (http://woodgears.ca/gear/index.html). Tomēr sākotnējie dati konstrukcijām ir kaut kā netradicionāli... un zobu dobumi ir bez radiālās atstarpes.
Vēlos atzīmēt, ka lejupielādei tika piedāvāts Excel fails ar zoba profila aprēķiniem šajā gadījumā nav pilnvērtīga programma un prasa lietotājam pamatzināšanas par MS Excel un izpratni par problēmas ģeometriju.
Jo īpaši, mainot avota datus, jums būs manuāli jāpielāgo asu skalas un jānodrošina, lai skala gar X asi ir vienāda ar skalu gar Y asi (līniju režģim jāveido kvadrāti, nevis taisnstūri). Pārsūtot koordinātas uz CAD programmu, evolūcijas un pārejas līknes savienojuma punkts būs jāpielāgo manuāli, nogriežot liekās līkņu daļas.
Piedāvātais algoritms tika uzrakstīts (baidīgi domāt) 1992. gadā programmējamam kalkulatoram un bija paredzēts optisko slīpmašīnu vadības ekrānu zīmēšanai uz rasējamā dēļa.
ES lūdzu CIEŅA autora darbu lejupielādes fails PĒC SUBSCRIBE par rakstu paziņojumiem.
Cienījamie lasītāji, lūdzu, rakstiet jautājumus, atsauksmes un komentārus komentāros lapas apakšā.
Emuārā ir vairāki raksti, kas veltīti zvejas rīkiem (un citiem) zobratiem. Vienkāršākais veids, kā tos atrast, ir doties uz lapu “Visi emuāra raksti”, izmantojot tālāk norādīto saiti.
Raksti par līdzīgām tēmām
Atsauksmes
34 komentāri par tēmu “Kā izveidot precīzu zobu profilu?”
- Jevgeņijs 2015. gada 24. septembrī 12:10
- Aleksandrs Vorobjovs 2015. gada 24. septembris 14:28
- Aleksandrs Vorobjovs 2016. gada 23. februāris 10:31
- 4APK, 05.03.2016., 13:49
- Aleksandrs Vorobjovs 05.03.2016 16:01
- Jaroslavs 11.04.2016 13:22
- Aleksandrs Vorobjovs 11.04.2016 13:38
- Sergejs Ermolinskis 2016. gada 14. jūnijs 20:16
- Jevgeņijs 08. decembris 2016 16:25
- Vladimirs 2017. gada 11. janvāris 18:52
- Aleksandrs Vorobjovs 2017. gada 11. janvāris 19:43
- Vitālijs 2017. gada 17. janvāris 22:01
- Aleksandrs Vorobjovs 2017. gada 17. janvāris 23:20
- Grayling 09.02.2017 23:38
- Aleksandrs Vorobjovs 2017. gada 10. februāris 22:50
- Anatolijs 06.03.2017 21:18
- Aleksandrs Vorobjovs 06.03.2017 23:29
- Artem, 2017. gada 26. marts, 21:06
- Aleksandrs Vorobjovs 2017. gada 26. marts 22:19
- Aleksandrs 02.04.2017 03:22
- Aleksandrs Vorobjovs 02.04.2017 11:27
- Aleksandrs 02.04.2017 23:09
- Aleksandrs Vorobjovs 04.04.2017 11:43
- Aleksandrs 08.04.2017 23:22
- Aleksandrs Vorobjovs 09.04.2017 00:06
- Vladimirs 2017. gada 3. maijs 00:30
- Aleksandrs Vorobjovs 03.05.2017 08:38
- Igors 07.06.2017 19:00
- Aleksandrs Vorobjovs 07.06.2017 20:32
- Anatolijs 2017. gada 10. oktobris 20:09
- Aleksandrs Vorobjovs 2017. gada 10. oktobris 23:07
- Anatolijs 2017. gada 17. oktobris 19:16
- Aleksandrs Vorobjovs 2017. gada 17. oktobris 21:40
- Anatolijs 2017. gada 18. oktobris 12:39







