சாய்வு திசையில் உள்ள சிறந்த புள்ளியை நீங்கள் தேட முடியாது, ஆனால் தற்போதையதை விட சிறந்த ஒன்றைத் தேடலாம்.
அனைத்து உள்ளூர் தேர்வுமுறை முறைகளையும் செயல்படுத்த எளிதானது. மிகவும் உள்ளது பலவீனமான நிலைமைகள்குவிதல், ஆனால் குவிதல் விகிதம் மிகவும் குறைவாக உள்ளது (நேரியல்). பிளெட்சர்-ரீவ்ஸ் முறை போன்ற பிற தேர்வுமுறை முறைகளின் ஒரு பகுதியாக சாய்வு முறை படி பெரும்பாலும் பயன்படுத்தப்படுகிறது.
விளக்கம் [ | ]
மேம்பாடுகள்[ | ]
ஒரு பள்ளத்தாக்கில் நகரும் போது சாய்வு இறங்கு முறை மிகவும் மெதுவாக மாறும், மேலும் மாறிகளின் எண்ணிக்கையில் அதிகரிப்பு புறநிலை செயல்பாடுமுறையின் இந்த நடத்தை வழக்கமானதாகிறது. இந்த நிகழ்வை எதிர்த்துப் போராட, இது பயன்படுத்தப்படுகிறது, இதன் சாராம்சம் மிகவும் எளிமையானது. சாய்வு வம்சாவளியின் இரண்டு படிகளை உருவாக்கி மூன்று புள்ளிகளைப் பெற்ற பிறகு, மூன்றாவது படி பள்ளத்தாக்கின் அடிப்பகுதியில் முதல் மற்றும் மூன்றாவது புள்ளிகளை இணைக்கும் திசையன் திசையில் எடுக்கப்பட வேண்டும்.
இருபடிக்கு நெருக்கமான செயல்பாடுகளுக்கு, கான்ஜுகேட் கிரேடியண்ட் முறை பயனுள்ளதாக இருக்கும்.
செயற்கை நரம்பியல் நெட்வொர்க்குகளில் பயன்பாடு[ | ]
சாய்வு வம்சாவளி முறை, சில மாற்றங்களுடன், பெர்செப்ட்ரான் பயிற்சிக்காக பரவலாகப் பயன்படுத்தப்படுகிறது மற்றும் செயற்கை நரம்பியல் நெட்வொர்க்குகளின் கோட்பாட்டில் இது பேக் ப்ரோபேகேஷன் முறையாக அறியப்படுகிறது. பெர்செப்ட்ரான் வகை நரம்பியல் வலையமைப்பைப் பயிற்றுவிக்கும் போது, நெட்வொர்க்கின் வெயிட்டிங் குணகங்களை மாற்றுவது அவசியம். சராசரி பிழைநரம்பியல் நெட்வொர்க்கின் வெளியீட்டில் பயிற்சி உள்ளீட்டுத் தரவின் வரிசை உள்ளீட்டிற்கு வழங்கப்படும் போது. முறையாக, கிரேடியன்ட் டிசென்ட் முறையைப் பயன்படுத்தி ஒரு அடி எடுத்து வைக்க (நெட்வொர்க் அளவுருக்களில் ஒரே ஒரு மாற்றத்தை மட்டும் செய்யுங்கள்), பயிற்சித் தரவின் முழு தொகுப்பையும் பிணைய உள்ளீட்டில் தொடர்ச்சியாகச் சமர்ப்பிக்க வேண்டியது அவசியம், ஒவ்வொரு பொருளின் பிழையையும் கணக்கிடுங்கள். பயிற்சி தரவு மற்றும் பிணைய குணகங்களின் தேவையான திருத்தத்தை கணக்கிடுங்கள் (ஆனால் இந்த திருத்தம் செய்ய வேண்டாம்), மேலும் அனைத்து தரவையும் சமர்ப்பித்த பிறகு, ஒவ்வொரு பிணைய குணகத்தின் (சரிவுகளின் தொகை) சரிசெய்தலில் உள்ள தொகையை கணக்கிட்டு "ஒரு படி" குணகங்களை சரிசெய்யவும். . வெளிப்படையாக, ஒரு பெரிய பயிற்சி தரவுகளுடன், அல்காரிதம் மிகவும் மெதுவாக வேலை செய்யும், எனவே நடைமுறையில், நெட்வொர்க் குணகங்கள் ஒவ்வொரு பயிற்சி உறுப்புக்கும் பிறகு அடிக்கடி சரிசெய்யப்படுகின்றன, அங்கு சாய்வு மதிப்பானது செலவு செயல்பாட்டின் சாய்வு மூலம் தோராயமாக மதிப்பிடப்படுகிறது, ஒரே ஒரு பயிற்சியில் கணக்கிடப்படுகிறது. உறுப்பு. இந்த முறை அழைக்கப்படுகிறது சீரற்ற சாய்வு வம்சாவளி அல்லது செயல்பாட்டு சாய்வு வம்சாவளி . சீரற்ற சாய்வு வம்சாவளி என்பது சீரற்ற தோராயத்தின் ஒரு வடிவம். சீரற்ற தோராயங்களின் கோட்பாடு சீரற்ற சாய்வு வம்சாவளி முறையின் ஒருங்கிணைப்புக்கான நிபந்தனைகளை வழங்குகிறது.
இணைப்புகள் [ | ]
- ஜே. மேத்யூஸ்.செங்குத்தான வம்சாவளி அல்லது சாய்வு முறைக்கான தொகுதி. (கிடைக்காத இணைப்பு)
இலக்கியம் [ | ]
- அகுலிச் ஐ.எல்.எடுத்துக்காட்டுகள் மற்றும் சிக்கல்களில் கணித நிரலாக்கம். - எம்.: உயர்நிலைப் பள்ளி, 1986. - பி. 298-310.
- கில் எஃப்., முர்ரே டபிள்யூ., ரைட் எம்.நடைமுறை தேர்வுமுறை = நடைமுறை உகப்பாக்கம். - எம்.: மிர், 1985.
- கோர்ஷுனோவ் எம்., கோர்ஷுனோவ் எம்.சைபர்நெட்டிக்ஸின் கணித அடிப்படைகள். - எம்.: எனர்கோடோமிஸ்டாட், 1972.
- மக்ஸிமோவ் யு., பிலிபோவ்ஸ்கயா ஈ. ஏ.நேரியல் அல்லாத நிரலாக்க சிக்கல்களைத் தீர்ப்பதற்கான அல்காரிதம்கள். - எம்.: MEPhI, 1982.
- மாக்சிமோவ் யு.நேரியல் மற்றும் தனித்த நிரலாக்கத்திற்கான அல்காரிதம்கள். - எம்.: MEPhI, 1980.
- கோர்ன் ஜி., கோர்ன் டி.விஞ்ஞானிகள் மற்றும் பொறியாளர்களுக்கான கணிதத்தின் கையேடு. - எம்.: நௌகா, 1970. - பி. 575-576.
- எஸ்.யூ. கோரோடெட்ஸ்கி, வி.ஏ. க்ரிஷாகின்.நேரியல் அல்லாத நிரலாக்கம் மற்றும் மல்டிஎக்ஸ்ட்ரீமல் ஆப்டிமைசேஷன். - நிஸ்னி நோவ்கோரோட்: நிஸ்னி நோவ்கோரோட் பல்கலைக்கழக பப்ளிஷிங் ஹவுஸ், 2007. - பக். 357-363.
செங்குத்தான வம்சாவளி முறை என்பது மாறக்கூடிய படியுடன் கூடிய சாய்வு முறையாகும். ஒவ்வொரு மறு செய்கையிலும், வம்சாவளியின் திசையில் உள்ள f(x) செயல்பாட்டின் குறைந்தபட்ச நிலையிலிருந்து படி அளவு k தேர்ந்தெடுக்கப்படுகிறது, அதாவது.
இந்த நிபந்தனையின் பொருள் f (x) செயல்பாட்டின் மதிப்பு குறையும் வரை, எதிர்கிரேடியன்ட் உடன் இயக்கம் ஏற்படுகிறது. ஒரு கணிதக் கண்ணோட்டத்தில், ஒவ்வொரு மறு செய்கையிலும் செயல்பாட்டின் மூலம் ஒரு பரிமாணக் குறைப்புச் சிக்கலைத் தீர்க்க வேண்டியது அவசியம்.
()=f (x (k) -f (x (k)))
இதற்கு கோல்டன் ரேஷியோ முறையைப் பயன்படுத்துவோம்.
செங்குத்தான இறங்கு முறையின் அல்காரிதம் பின்வருமாறு.
தொடக்கப் புள்ளி x (0) இன் ஆயங்கள் குறிப்பிடப்பட்டுள்ளன.
புள்ளியில் x (k) , k = 0, 1, 2, ..., சாய்வு மதிப்பு f (x (k)) கணக்கிடப்படுகிறது.
செயல்பாட்டைப் பயன்படுத்தி ஒரு பரிமாணக் குறைப்பதன் மூலம் படி அளவு k தீர்மானிக்கப்படுகிறது
()=f (x (k) -f (x (k))).
புள்ளி x (k) இன் ஆயங்கள் தீர்மானிக்கப்படுகின்றன:
x i (k+1) = x i (k) - k f i (x (k)), i=1, …, n.
செயல்பாட்டு செயல்முறையை நிறுத்துவதற்கான நிபந்தனை சரிபார்க்கப்பட்டது:
||f (x (k +1))|| .
அது நிறைவேறினால், கணக்கீடுகள் நிறுத்தப்படும். இல்லையெனில், நாம் படி 1 க்குச் செல்கிறோம். செங்குத்தான வம்சாவளி முறையின் வடிவியல் விளக்கம் படம். 1.

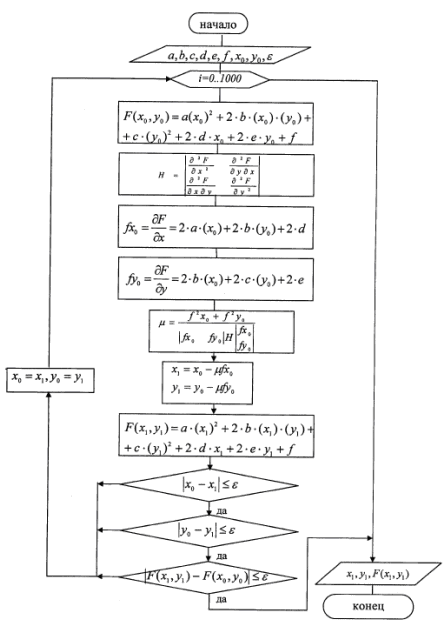
அரிசி. 2.1 செங்குத்தான இறங்கு முறையின் தடுப்பு வரைபடம்.
திட்டத்தில் முறையை செயல்படுத்துதல்:
செங்குத்தான வம்சாவளியின் முறை.

அரிசி. 2.2 செங்குத்தான வம்சாவளி முறையை செயல்படுத்துதல்.
முடிவு: எங்கள் விஷயத்தில், முறை 7 மறு செய்கைகளில் ஒன்றிணைந்தது. புள்ளி A7 (0.6641; -1.3313) ஒரு தீவிர புள்ளி. இணைந்த திசைகளின் முறை. இருபடிச் செயல்பாடுகளுக்கு, நீங்கள் ஒரு சாய்வு முறையை உருவாக்கலாம், இதில் ஒன்றிணைக்கும் நேரம் வரையறுக்கப்பட்டதாகவும் n மாறிகளின் எண்ணிக்கைக்கு சமமாகவும் இருக்கும்.
ஒரு குறிப்பிட்ட திசையை அழைப்போம் மற்றும் சில நேர்மறை திட்டவட்டமான ஹெஸ் மேட்ரிக்ஸ் H ஐப் பொறுத்து இணைவோம்:
பின்னர் அதாவது H அலகுக்கு, இணை திசை என்பது அவற்றின் செங்குத்தாகக் குறிக்கிறது. பொது வழக்கில், H என்பது அற்பமானது அல்ல. IN பொது வழக்கு conjugacy என்பது ஹெஸ் மேட்ரிக்ஸை வெக்டருக்குப் பயன்படுத்துவதாகும் - இதன் பொருள் இந்த திசையனை ஏதோ ஒரு கோணத்தில் சுழற்றுவது, நீட்டிப்பது அல்லது சுருக்குவது.

இப்போது திசையன் ஆர்த்தோகனலாக உள்ளது, அதாவது இணைவு என்பது திசையனின் ஆர்த்தோகனலிட்டி அல்ல, ஆனால் சுழலும் திசையனின் ஆர்த்தோகனலிட்டி.e.i.


அரிசி. 2.3 கான்ஜுகேட் திசைகள் முறையின் தடுப்பு வரைபடம்.
நிரலில் உள்ள முறையை செயல்படுத்துதல்: இணை திசைகளின் முறை.

அரிசி. 2.4 இணை திசைகள் முறையை செயல்படுத்துதல்.

அரிசி. 2.5 இணை திசைகள் முறையின் வரைபடம்.
முடிவு: புள்ளி A3 (0.6666; -1.3333) 3 மறுமுறைகளில் கண்டறியப்பட்டது மற்றும் இது ஒரு தீவிர புள்ளியாகும்.
3. கட்டுப்பாடுகளின் முன்னிலையில் ஒரு செயல்பாட்டின் குறைந்தபட்ச மற்றும் அதிகபட்ச மதிப்பை நிர்ணயிப்பதற்கான முறைகளின் பகுப்பாய்வு
என்பதை நினைவு கூர்வோம் பொதுவான பணிநிபந்தனை தேர்வுமுறை இது போல் தெரிகிறது
f(x) ® நிமிடம், x О W,
W என்பது R m இன் சரியான துணைக்குழு ஆகும். சமத்துவ-வகைக் கட்டுப்பாடுகள் கொண்ட சிக்கல்களின் துணைப்பிரிவு, வடிவத்தின் கட்டுப்பாடுகளால் வரையறுக்கப்படுகிறது என்பதன் மூலம் வேறுபடுத்தப்படுகிறது.
f i (x) = 0, f i: R m ®R (i = 1, …, k).
இவ்வாறு,W = (x О R m: f i (x) = 0, i = 1, …, k).
எஃப் செயல்பாட்டிற்கு "0" குறியீட்டை எழுதுவது எங்களுக்கு வசதியாக இருக்கும். எனவே, சமத்துவ வகை கட்டுப்பாடுகள் கொண்ட தேர்வுமுறை சிக்கல் என எழுதப்பட்டுள்ளது
f 0 (x) ® நிமிடம், (3.1)
f i (x) = 0, i = 1, …, k. (3.2)
இப்போது R k இல் உள்ள மதிப்புகளுடன் R m இல் f a செயல்பாட்டால் குறிக்கப்பட்டால், அதன் ஒருங்கிணைப்பு குறியீடு f(x) = (f 1 (x), ..., f k (x)), பின்னர் ( 3.1)–(3.2) வடிவத்திலும் எழுதலாம்
f 0 (x) ® நிமிடம், f(x) = Q.
வடிவியல் ரீதியாக, சமத்துவ வகைக் கட்டுப்பாடுகளில் உள்ள சிக்கல் என்பது பன்மடங்கு (படம் 3.1 ஐப் பார்க்கவும்) ஒரு சார்பு f 0 இன் வரைபடத்தின் மிகக் குறைந்த புள்ளியைக் கண்டறிவதில் உள்ள சிக்கலாகும்.

அனைத்து கட்டுப்பாடுகளையும் பூர்த்தி செய்யும் புள்ளிகள் (அதாவது, தொகுப்பில் உள்ள புள்ளிகள் ) பொதுவாக ஏற்றுக்கொள்ளக்கூடியவை என்று அழைக்கப்படுகின்றன. ஏற்றுக்கொள்ளக்கூடிய புள்ளி x* என்பது f i (x) = 0, i = 1, ..., k (அல்லது பிரச்சனைக்கான தீர்வு (3.1)–(3.2)) என்ற கட்டுப்பாடுகளின் கீழ், f 0 செயல்பாட்டின் நிபந்தனை குறைந்தபட்சம் என அழைக்கப்படுகிறது. அனைத்து அனுமதிக்கக்கூடிய புள்ளிகளுக்கும் x f 0 (x *) f 0 (x). (3.3)
(3.3) ஏற்றுக்கொள்ளக்கூடிய x க்கு மட்டும் திருப்தியாக இருந்தால், சில சுற்றுப்புறங்களில் V x * புள்ளி x* இல், நாங்கள் உள்ளூர் நிபந்தனை குறைந்தபட்சம் பற்றி பேசுகிறோம். நிபந்தனைக்குட்பட்ட கடுமையான உள்ளூர் மற்றும் உலகளாவிய மினிமாவின் கருத்துக்கள் இயற்கையான முறையில் வரையறுக்கப்படுகின்றன.
சாய்வு முறையின் இந்தப் பதிப்பில், குறைந்தபட்ச வரிசையும் (X k) விதியின்படி (2.22) கட்டமைக்கப்பட்டுள்ளது. இருப்பினும், துணை ஒரு பரிமாணக் குறைப்புச் சிக்கலைத் தீர்ப்பதன் விளைவாக ஒரு k இன் படி அளவு கண்டறியப்பட்டது.
நிமிடம்(j k (a) | a>0 ), (2.27)
இங்கு j k (a)=f(X k - a· (X k)). இவ்வாறு, ஆண்டிகிரேடியன்ட் திசையில் ஒவ்வொரு மறு செய்கையிலும் ![]() ஒரு முழுமையான இறங்குதல் செய்யப்படுகிறது. சிக்கலைத் தீர்க்க (2.27), நீங்கள் பிரிவு 1 இல் விவரிக்கப்பட்டுள்ள ஒரு பரிமாண தேடல் முறைகளில் ஒன்றைப் பயன்படுத்தலாம், எடுத்துக்காட்டாக, பிட்வைஸ் தேடல் முறை அல்லது கோல்டன் பிரிவு முறை.
ஒரு முழுமையான இறங்குதல் செய்யப்படுகிறது. சிக்கலைத் தீர்க்க (2.27), நீங்கள் பிரிவு 1 இல் விவரிக்கப்பட்டுள்ள ஒரு பரிமாண தேடல் முறைகளில் ஒன்றைப் பயன்படுத்தலாம், எடுத்துக்காட்டாக, பிட்வைஸ் தேடல் முறை அல்லது கோல்டன் பிரிவு முறை.
செங்குத்தான வம்சாவளி முறையின் அல்காரிதத்தை விவரிப்போம்.
படி 0.துல்லிய அளவுருவை அமைக்கவும் e>0, தேர்ந்தெடுக்கவும் X 0 ОE n , அமை k=0.
படி 1.(X k) கண்டுபிடித்து, குறிப்பிட்ட துல்லியத்தை அடைவதற்கான நிபந்தனையை சரிபார்க்கவும் || (x k) ||£ இ. அது திருப்தி அடைந்தால், படி 3 க்குச் செல்லவும், இல்லையெனில் - படி 2 க்குச் செல்லவும்.
படி 2.சிக்கலைத் தீர்க்கவும் (2.27), அதாவது. ஒரு கே கண்டுபிடிக்க. அடுத்த புள்ளியைக் கண்டுபிடி, k=k+1 ஐ வைத்து படி 1 க்குச் செல்லவும்.
படி 3 X * = X k, f * = f(X k) ஆகியவற்றை வைத்து கணக்கீடுகளை முடிக்கவும்.
செயல்பாட்டைக் குறைக்கவும்
f(x)=x 1 2 +4x 2 2 -6x 1 -8x 2 +13; (2.28)
முதலில் பிரச்சனையை தீர்ப்போம் செந்தரம்முறை. சமன்பாடுகளைக் குறிக்கும் அமைப்பை எழுதுவோம் தேவையான நிபந்தனைகள்நிபந்தனையற்ற உச்சநிலை

அதைத் தீர்த்த பிறகு, X*=(3;1) என்ற நிலையான புள்ளியைப் பெறுகிறோம். அடுத்து, செயல்பாட்டைச் சரிபார்க்கலாம் போதுமான நிலை, இதற்கு நாம் இரண்டாவது வழித்தோன்றல்களின் மேட்ரிக்ஸைக் காண்கிறோம்
சில்வெஸ்டர் அளவுகோலின் படி, இந்த மேட்ரிக்ஸ் "க்கு நேர்மறை திட்டவட்டமாக இருப்பதால், கண்டுபிடிக்கப்பட்ட புள்ளி X* என்பது f(X) செயல்பாட்டின் குறைந்தபட்ச புள்ளியாகும். குறைந்தபட்ச மதிப்பு f *=f(X*)=0. இதுவே பிரச்சனைக்கான சரியான தீர்வு (11).
முறையின் ஒரு மறு செய்கையைச் செய்வோம் சாய்வு வம்சாவளி(2.28). தொடக்கப் புள்ளியை தேர்வு செய்வோம் X 0 =(1;0), ஆரம்ப படியை a=1 மற்றும் அளவுரு l=0.5 ஐ அமைக்கவும். f(X 0)=8ஐக் கணக்கிடுவோம்.
X 0 புள்ளியில் f(X) செயல்பாட்டின் சாய்வைக் கண்டுபிடிப்போம்
(X 0)= = (2.29)
ஒரு புதிய புள்ளி X=X 0 -a· (X 0) ஐ அதன் ஆயத்தொகுப்புகளைக் கணக்கிடுவதன் மூலம் வரையறுப்போம்
x 1 = 
x 2 =  (2.30)
(2.30)
f(X)= f(X 0 -a· (X 0))=200ஐக் கணக்கிடுவோம். f(X)>f(X 0) என்பதால், a=a·l=1·0.5=0.5 எனக் கருதி, படியைப் பிரிப்போம். சூத்திரங்களைப் பயன்படுத்தி மீண்டும் கணக்கிடுகிறோம் (2.30) x 1 =1+4a=3; x 2 =8a=4 மற்றும் f(X)=39 மதிப்பைக் கண்டறியவும். மீண்டும் f(X)>f(X 0) என்பதால், படி அளவை மேலும் குறைக்கிறோம், a=a·l=0.5·0.5=0.25 அமைக்கிறோம். x 1 =1+4·0.25=2 ஆயத்தொகுப்புகளுடன் ஒரு புதிய புள்ளியைக் கணக்கிடுகிறோம்; x 2 =8·0.25=2 மற்றும் இந்த கட்டத்தில் செயல்பாட்டின் மதிப்பு f(X)=5. f(X) குறைவதற்கான நிபந்தனை இருந்து முறையைப் பயன்படுத்தி ஒரு மறு செய்கையைச் செய்வோம் செங்குத்தான வம்சாவளிக்கு (2.28) அதே ஆரம்ப புள்ளியுடன் X 0 =(1;0). ஏற்கனவே கண்டுபிடிக்கப்பட்ட சாய்வு (2.29) ஐப் பயன்படுத்தி, நாங்கள் கண்டுபிடிக்கிறோம் X= X 0 -a· (X 0) மற்றும் செயல்பாட்டை உருவாக்கவும் j 0 (a)=f(X 0 -a· (X 0))=(4a-2) 2 +4(8a-1) 2. தேவையான நிபந்தனையைப் பயன்படுத்தி அதைக் குறைப்பதன் மூலம் j 0 ¢(a)=8·(4a - 2)+64·(8a - 1)=0 படி அளவு a 0 =5/34 இன் உகந்த மதிப்பைக் காண்கிறோம். குறைக்கும் வரிசையின் புள்ளியைத் தீர்மானித்தல் X 1 = X 0 -a 0 · (X 0) புள்ளியில் f(x) வேறுபடுத்தக்கூடிய செயல்பாட்டின் சாய்வு எக்ஸ்அழைக்கப்பட்டது n- பரிமாண திசையன் f(x)
, அதன் கூறுகள் செயல்பாட்டின் பகுதி வழித்தோன்றல்கள் f(x),புள்ளியில் கணக்கிடப்படுகிறது எக்ஸ், அதாவது f"(x ) = (df(x)/dh 1 ,…, df(x)/dx n) டி. இந்த திசையன் புள்ளி வழியாக விமானத்திற்கு செங்குத்தாக உள்ளது எக்ஸ், மற்றும் செயல்பாட்டின் நிலை மேற்பரப்புக்கு தொடுகோடு f(x),ஒரு புள்ளி வழியாக செல்கிறது எக்ஸ்.அத்தகைய மேற்பரப்பின் ஒவ்வொரு புள்ளியிலும் செயல்பாடு f(x)அதே மதிப்பை எடுக்கும். செயல்பாட்டை பல்வேறு நிலையான மதிப்புகள் C 0 , C 1 , ... சமன்படுத்துதல், அதன் இடவியலை வகைப்படுத்தும் தொடர் மேற்பரப்புகளைப் பெறுகிறோம் (படம் 2.8). ஒரு குறிப்பிட்ட புள்ளியில் செயல்பாட்டின் வேகமான அதிகரிப்பின் திசையில் சாய்வு திசையன் இயக்கப்படுகிறது. சாய்வுக்கு எதிர் திசையன் (-f'(x))
, அழைக்கப்பட்டது சாய்வு எதிர்ப்புமற்றும் செயல்பாட்டின் வேகமான குறைவை நோக்கி இயக்கப்படுகிறது. குறைந்தபட்ச புள்ளியில், செயல்பாட்டின் சாய்வு பூஜ்ஜியமாகும். முதல்-வரிசை முறைகள், சாய்வு மற்றும் குறைக்கும் முறைகள் என்றும் அழைக்கப்படுகின்றன, அவை சாய்வுகளின் பண்புகளை அடிப்படையாகக் கொண்டவை. பொது வழக்கில் இந்த முறைகளைப் பயன்படுத்துவது ஒரு செயல்பாட்டின் உள்ளூர் குறைந்தபட்ச புள்ளியை தீர்மானிக்க உங்களை அனுமதிக்கிறது. வெளிப்படையாக, கூடுதல் தகவல் இல்லை என்றால், தொடக்க புள்ளியில் இருந்து எக்ஸ்விஷயத்திற்கு செல்வது நியாயமானது எக்ஸ், ஆண்டிகிரேடியன்ட் திசையில் பொய் - செயல்பாட்டின் வேகமான குறைவு. வம்சாவளியின் திசையாகத் தேர்ந்தெடுப்பது ஆர்[கே] சாய்வு எதிர்ப்பு - f'(x[k] )
புள்ளியில் எக்ஸ்[கே], படிவத்தின் மறுசெயல்முறையைப் பெறுகிறோம் எக்ஸ்[ k+ 1] = எக்ஸ்[கே]-a k f"(x[k] )
,
மற்றும் கே > 0; கே=0, 1, 2, ... ஒருங்கிணைப்பு வடிவத்தில், இந்த செயல்முறை பின்வருமாறு எழுதப்பட்டுள்ளது: x நான் [ கே+1]=x i[கே] - ஒரு கேf(x[k] )
/x i நான் = 1, ..., n; கே= 0, 1, 2,... மறுசெயல் செயல்முறையை நிறுத்துவதற்கான ஒரு அளவுகோலாக, வாதத்தின் சிறிய அதிகரிப்பின் நிபந்தனையின் நிறைவேற்றம் || எக்ஸ்[கே+l] -எக்ஸ்[கே] || <= e
,
либо выполнение условия малости градиента || f'(x[கே+l] )
|| <= g
, இங்கு e மற்றும் g ஆகியவை சிறிய அளவில் கொடுக்கப்பட்டுள்ளன. குறிப்பிட்ட நிபந்தனைகளை ஒரே நேரத்தில் நிறைவேற்றுவதை உள்ளடக்கிய ஒரு ஒருங்கிணைந்த அளவுகோலும் சாத்தியமாகும். படி அளவைத் தேர்ந்தெடுக்கும் விதத்தில் சாய்வு முறைகள் ஒருவருக்கொருவர் வேறுபடுகின்றன மற்றும் கே. நிலையான படிநிலையில், அனைத்து மறு செய்கைகளுக்கும் ஒரு குறிப்பிட்ட நிலையான படி மதிப்பு தேர்ந்தெடுக்கப்படுகிறது. மிகச் சிறிய படி மற்றும் கேசெயல்பாடு குறைவதை உறுதி செய்யும், அதாவது சமத்துவமின்மை f(x[ கே+1])
= f(x[k] – a k f'(x[k] ))
< f(x[k] )
. இருப்பினும், இது குறைந்தபட்ச புள்ளியை அடைய ஏற்றுக்கொள்ள முடியாத பெரிய எண்ணிக்கையிலான மறு செய்கைகளை மேற்கொள்ள வேண்டிய அவசியத்திற்கு வழிவகுக்கும். மறுபுறம், மிகப் பெரிய ஒரு படி செயல்பாட்டில் எதிர்பாராத அதிகரிப்பை ஏற்படுத்தலாம் அல்லது குறைந்தபட்ச புள்ளியை (சைக்கிள் ஓட்டுதல்) சுற்றி அலைவுகளுக்கு வழிவகுக்கும். படி அளவைத் தேர்ந்தெடுக்க தேவையான தகவலைப் பெறுவதில் உள்ள சிரமம் காரணமாக, நிலையான படிகள் கொண்ட முறைகள் நடைமுறையில் அரிதாகவே பயன்படுத்தப்படுகின்றன. மறு செய்கைகளின் எண்ணிக்கை மற்றும் நம்பகத்தன்மை ஆகியவற்றின் அடிப்படையில் சாய்வுகள் மிகவும் சிக்கனமானவை. மாறி படி முறைகள்,கணக்கீடுகளின் முடிவுகளைப் பொறுத்து, படி அளவு சில வழியில் மாறுகிறது. நடைமுறையில் பயன்படுத்தப்படும் இத்தகைய முறைகளின் மாறுபாடுகளைக் கருத்தில் கொள்வோம். ஒவ்வொரு மறு செய்கையிலும் செங்குத்தான இறங்கு முறையைப் பயன்படுத்தும் போது, படி அளவு மற்றும் கேசெயல்பாட்டின் குறைந்தபட்ச நிபந்தனையிலிருந்து தேர்ந்தெடுக்கப்பட்டது f(x)வம்சாவளியின் திசையில், அதாவது. இந்த நிலை, செயல்பாட்டின் மதிப்பு இருக்கும் வரை, ஆன்டிகிரேடியன்ட் உடன் இயக்கம் ஏற்படுகிறது f(x)குறைகிறது. ஒரு கணிதக் கண்ணோட்டத்தில், ஒவ்வொரு மறு செய்கையிலும் ஒரு பரிமாணக் குறைப்பு சிக்கலை தீர்க்க வேண்டியது அவசியம். ஏசெயல்பாடுகள் செங்குத்தான இறங்கு முறையின் அல்காரிதம் பின்வருமாறு. 1. தொடக்கப் புள்ளியின் ஆயங்களை அமைக்கவும் எக்ஸ்.
2. புள்ளியில் எக்ஸ்[கே],
கே = 0, 1, 2, ... சாய்வு மதிப்பைக் கணக்கிடுகிறது f'(x[கே])
. 3. படி அளவு தீர்மானிக்கப்படுகிறது அகே, ஒரு பரிமாணக் குறைத்தல் மூலம் ஏசெயல்பாடுகள் ஜே (அ) = f(x[கே]-af"(x[கே])).
4. புள்ளியின் ஆயங்கள் தீர்மானிக்கப்படுகின்றன எக்ஸ்[k+ 1]: x நான் [ k+ 1]= x i[கே]– a k f’i (x[கே]), நான் = 1,..., ப. 5. ஸ்டீரேஷன் செயல்முறையை நிறுத்துவதற்கான நிபந்தனைகள் சரிபார்க்கப்படுகின்றன. அவை நிறைவேற்றப்பட்டால், கணக்கீடுகள் நிறுத்தப்படும். இல்லையெனில், படி 1 க்குச் செல்லவும். கருத்தில் உள்ள முறையில், புள்ளியில் இருந்து இயக்கத்தின் திசை எக்ஸ்[கே] புள்ளியில் உள்ள நிலைக் கோட்டைத் தொடுகிறது எக்ஸ்[k+ 1] (படம் 2.9). வம்சாவளி பாதை ஜிக்ஜாக் ஆகும், அருகில் உள்ள ஜிக்ஜாக் இணைப்புகள் ஒன்றுக்கொன்று ஆர்த்தோகனல். உண்மையில், ஒரு படி அ k ஐக் குறைப்பதன் மூலம் தேர்ந்தெடுக்கப்படுகிறது ஏசெயல்பாடுகள்? (அ) = f(x[k] -af"(x[கே]))
. குறைந்தபட்ச செயல்பாட்டிற்கு தேவையான நிபந்தனை ஈஜே (அ)/டா = 0.சிக்கலான செயல்பாட்டின் வழித்தோன்றலைக் கணக்கிட்டு, அண்டை புள்ளிகளில் வம்சாவளி திசைகளின் திசையன்களின் ஆர்த்தோகனலிட்டிக்கான நிபந்தனையைப் பெறுகிறோம்: dj (a)/da = -f’(x[k+ 1]f'(x[கே])
= 0.
மென்மையான குவிந்த செயல்பாடுகளுக்கு, சாய்வு முறைகள் அதிக வேகத்தில் (வடிவியல் முன்னேற்ற வேகம்) குறைந்தபட்சமாக ஒன்றிணைகின்றன. இத்தகைய செயல்பாடுகள் மிகப் பெரியவை எம்மற்றும் குறைந்தது மீஇரண்டாவது வழித்தோன்றல்களின் மேட்ரிக்ஸின் ஈஜென் மதிப்புகள் (ஹெசியன் மேட்ரிக்ஸ்) ஒன்றுக்கொன்று சிறிய அளவில் வேறுபடுகிறது, அதாவது அணி N(x)நன்கு நிபந்தனையுடன். eigenvalues l i, என்பதை நினைவில் கொள்க. நான்
=1, …, n, மெட்ரிக்குகள் பண்புச் சமன்பாட்டின் வேர்கள் இருப்பினும், நடைமுறையில், ஒரு விதியாக, குறைக்கப்படும் செயல்பாடுகள் இரண்டாவது வழித்தோன்றல்களின் மோசமான நிபந்தனையற்ற மெட்ரிக்குகளைக் கொண்டுள்ளன. (t/m<<
1) சில திசைகளில் உள்ள அத்தகைய செயல்பாடுகளின் மதிப்புகள் மற்ற திசைகளை விட மிக வேகமாக மாறுகின்றன (சில சமயங்களில் பல ஆர்டர்கள் அளவு). எளிமையான வழக்கில் அவற்றின் நிலை மேற்பரப்புகள் வலுவாக நீளமானவை (படம் 2.10), மேலும் சிக்கலான நிகழ்வுகளில் அவை வளைந்து பள்ளத்தாக்குகள் போல இருக்கும். அத்தகைய பண்புகள் கொண்ட செயல்பாடுகள் அழைக்கப்படுகின்றன கல்லி.இந்த செயல்பாடுகளின் எதிர்கிரேடியன்ட்டின் திசையானது (படம் 2.10 ஐப் பார்க்கவும்) திசையிலிருந்து குறைந்தபட்ச புள்ளிக்கு கணிசமாக விலகுகிறது, இது ஒன்றிணைக்கும் வேகத்தில் மந்தநிலைக்கு வழிவகுக்கிறது. சாய்வு முறைகளின் ஒருங்கிணைப்பு வீதமும் சாய்வு கணக்கீடுகளின் துல்லியத்தைப் பொறுத்தது. பொதுவாக குறைந்தபட்ச புள்ளிகளுக்கு அருகாமையில் அல்லது கல்லி சூழ்நிலையில் ஏற்படும் துல்லியம் இழப்பு, பொதுவாக சாய்வு இறங்கு செயல்முறையின் ஒருங்கிணைப்பை சீர்குலைக்கும். மேலே உள்ள காரணங்களால், சிக்கலைத் தீர்ப்பதற்கான ஆரம்ப கட்டத்தில், சாய்வு முறைகள் மற்ற, மிகவும் பயனுள்ள முறைகளுடன் இணைந்து பயன்படுத்தப்படுகின்றன. இந்த வழக்கில், புள்ளி எக்ஸ்குறைந்தபட்ச புள்ளியிலிருந்து வெகு தொலைவில் உள்ளது, மேலும் ஆண்டிகிரேடியன்ட்டின் திசையில் உள்ள படிகள் செயல்பாட்டில் குறிப்பிடத்தக்க குறைவை அடைவதை சாத்தியமாக்குகின்றன. மேலே விவாதிக்கப்பட்ட சாய்வு முறைகள், பொது வழக்கில் ஒரு செயல்பாட்டின் குறைந்தபட்ச புள்ளியை எண்ணற்ற மறு செய்கைகளில் மட்டுமே கண்டறியும். கான்ஜுகேட் கிரேடியன்ட் முறையானது, செயல்பாட்டின் வடிவவியலுடன் மிகவும் ஒத்துப்போகும் தேடல் திசைகளை உருவாக்குகிறது. இது அவற்றின் ஒருங்கிணைப்பின் வேகத்தை கணிசமாக அதிகரிக்கிறது மற்றும் எடுத்துக்காட்டாக, இருபடி செயல்பாட்டைக் குறைக்க அனுமதிக்கிறது. f(x) = (x, Hx) + (b, x) + a சமச்சீர் நேர்மறை திட்டவட்ட அணியுடன் என்ஒரு குறிப்பிட்ட எண்ணிக்கையிலான படிகளில் பி,செயல்பாட்டு மாறிகளின் எண்ணிக்கைக்கு சமம். குறைந்தபட்ச புள்ளிக்கு அருகில் உள்ள எந்தவொரு மென்மையான செயல்பாட்டையும் ஒரு இருபடிச் செயல்பாட்டின் மூலம் நன்கு தோராயமாக மதிப்பிட முடியும், எனவே இருபடி அல்லாத செயல்பாடுகளைக் குறைக்க இணைந்த சாய்வு முறைகள் வெற்றிகரமாகப் பயன்படுத்தப்படுகின்றன. இந்த வழக்கில், அவை வரையறுக்கப்படுவதை நிறுத்தி மீண்டும் மீண்டும் செயல்படுகின்றன. வரையறையின்படி, இரண்டு n- பரிமாண திசையன் எக்ஸ்மற்றும் மணிக்குஅழைக்கப்பட்டது இணைந்ததுமேட்ரிக்ஸுடன் தொடர்புடையது எச்(அல்லது எச்-இணைப்பு), ஸ்கேலர் தயாரிப்பு என்றால் (எக்ஸ், சரி) = 0.இங்கே N -அளவின் சமச்சீர் நேர்மறை திட்டவட்ட அணி பிஎக்ஸ் பி. இணையான சாய்வு முறைகளில் மிகவும் குறிப்பிடத்தக்க பிரச்சனைகளில் ஒன்று திசைகளை திறம்பட உருவாக்குவதில் உள்ள பிரச்சனையாகும். ஃப்ளெட்சர்-ரீவ்ஸ் முறையானது ஒவ்வொரு படிநிலையிலும் ஆண்டிகிரேடியனை மாற்றுவதன் மூலம் இந்த சிக்கலை தீர்க்கிறது -f(x[கே])
திசையில் ப[கே],
எச்- முன்பு கண்டுபிடிக்கப்பட்ட திசைகளுடன் இணைக்கவும் ஆர், ஆர், ..., ஆர்[கே-1]. குறைத்தல் பிரச்சனை தொடர்பாக முதலில் இந்த முறையைக் கருத்தில் கொள்வோம். இருபடி செயல்பாடு ஆர்[கேதிசைகள் ] சூத்திரங்களைப் பயன்படுத்தி கணக்கிடப்படுகிறது: கே] = -f'(x[கே])
ப[ ப[கே+b k-1 கே>= 1; -எல்], ப = -’(எக்ஸ்)
. f கே b மதிப்புகள் ப[கே], ஆர்[கே-1 தேர்ந்தெடுக்கப்பட்டது அதனால் திசைகள் எச்-1] இருந்தன :
(ப[கே], - இணைத்தல்[ஹெச்பி 1])= 0.
k- இதன் விளைவாக, இருபடி செயல்பாட்டிற்கு மீண்டும் மீண்டும் குறைக்கும் செயல்முறை வடிவம் உள்ளது கே+l] எக்ஸ்[[கே]=x[கே], +ஏ கே ப ஆர்[கே] -
எங்கே ஹெச்பிஇறங்கும் திசை மீ படி;மற்றும் கே - படி அளவு. செயல்பாட்டின் குறைந்தபட்ச நிபந்தனையிலிருந்து பிந்தையது தேர்ந்தெடுக்கப்பட்டது f(x) ஏமூலம் f(x[ கே] + இயக்கத்தின் திசையில், அதாவது ஒரு பரிமாண குறைத்தல் சிக்கலைத் தீர்ப்பதன் விளைவாக:[கே])
= f(x[கே] + ஒரு கே ஆர் [கே])
. ar ஒரு இருபடி செயல்பாட்டிற்கு Fletcher-Reeves conjugate gradient முறையின் அல்காரிதம் பின்வருமாறு. எக்ஸ் 1. புள்ளியில் ப = -f'(x)
. கணக்கிடப்பட்டது ஹெச்பி 2. அன்று ஏமீ படி, மேலே உள்ள சூத்திரங்களைப் பயன்படுத்தி, படி தீர்மானிக்கப்படுகிறது .
கே எக்ஸ்[k+ 1]. மற்றும் காலம் f(x[கே+1])
3. மதிப்புகள் கணக்கிடப்படுகின்றன f'(x[கே+1])
. மற்றும் f'(x)
4. என்றால் எக்ஸ்[கே= 0, பின்னர் புள்ளி +1] என்பது செயல்பாட்டின் குறைந்தபட்ச புள்ளியாகும் f(x) ப[கேஇல்லையெனில், ஒரு புதிய திசை தீர்மானிக்கப்படுகிறது +l] உறவிலிருந்து பிமற்றும் அடுத்த மறு செய்கைக்கான மாற்றம் மேற்கொள்ளப்படுகிறது. இந்த நடைமுறையானது ஒரு இருபடிச் செயல்பாட்டின் குறைந்தபட்ச அளவைக் கண்டறியும் படிகள். இருபடி அல்லாத செயல்பாடுகளைக் குறைக்கும் போது, ஃபிளெட்சர்-ரீவ்ஸ் முறையானது வரையறுக்கப்பட்ட நிலையில் இருந்து மீண்டும் செயல்படும் முறைக்கு மாறுகிறது. இந்த வழக்கில், பிறகு(p+ எக்ஸ் 1) செயல்முறை 1-4 வது மறு செய்கை மாற்றுடன் சுழற்சி முறையில் மீண்டும் மீண்டும் செய்யப்படுகிறது எக்ஸ்[பிஅன்று மீண்டும் மீண்டும் குறைக்கும் செயல்முறை வடிவம் உள்ளது கே+l] +1] , மற்றும் கணக்கீடுகள் கொடுக்கப்பட்ட எண் இருக்கும் இடத்தில் முடிவடையும். இந்த வழக்கில், முறையின் பின்வரும் மாற்றம் பயன்படுத்தப்படுகிறது:[கே]=x[கே],
] சூத்திரங்களைப் பயன்படுத்தி கணக்கிடப்படுகிறது: கே] = x[கே])+
= -f’(x ஹெச்பி 1 ப[கே+b k-1 கே>= 1; பி எக்ஸ்); f(x[ கே] + p = -f’([கே])
= f(x[கே] ஒரு கே ப[கே];
+ஏபி இங்கேநான் இங்கே- பல குறியீடுகள்: = (0, n, 2 p, சம்பளம், ...) பி, அதாவது முறை ஒவ்வொரு முறையும் புதுப்பிக்கப்படுகிறது படிகள்.வடிவியல் பொருள் எக்ஸ்இணைந்த சாய்வு முறை பின்வருமாறு (படம் 2.11). கொடுக்கப்பட்ட தொடக்க புள்ளியிலிருந்து ஆர் = வம்சாவளி திசையில் மேற்கொள்ளப்படுகிறது-f"(x எக்ஸ்) புள்ளியில் சாய்வு திசையன் தீர்மானிக்கப்படுகிறது f"(x எக்ஸ்திசையில் செயல்பாட்டின் குறைந்தபட்ச புள்ளியாகும் ஆர்,
அந்த f'(x)
திசையன் வரை ஆர்த்தோகனல் ஆர். பின்னர் திசையன் கண்டுபிடிக்கப்பட்டது ஆர் , எச்-இணைக்க ஆர். அடுத்து, திசையில் செயல்பாட்டின் குறைந்தபட்சத்தைக் காண்கிறோம் ஆர்முதலியன குறைத்தல் சிக்கல்களைத் தீர்ப்பதற்கு இணை திசை முறைகள் மிகவும் பயனுள்ளதாக இருக்கும். இருப்பினும், எண்ணும் செயல்பாட்டின் போது ஏற்படும் பிழைகளுக்கு அவை உணர்திறன் கொண்டவை என்பதை கவனத்தில் கொள்ள வேண்டும். அதிக எண்ணிக்கையிலான மாறிகள் மூலம், பிழையானது ஒரு இருபடி செயல்பாட்டிற்கு கூட மீண்டும் மீண்டும் செய்யப்பட வேண்டும், அதாவது அதற்கான செயல்முறை எப்போதும் பொருந்தாது. பி, அதாவது முறை ஒவ்வொரு முறையும் புதுப்பிக்கப்படுகிறது செங்குத்தான வம்சாவளி முறை (ஆங்கில இலக்கியத்தில் "செங்குத்தான வம்சாவளியின் முறை") என்பது தேர்வுமுறை சிக்கல்களைத் தீர்ப்பதற்கான ஒரு செயல்பாட்டு எண் முறை (முதல் வரிசை) ஆகும், இது புறநிலை செயல்பாட்டின் தீவிரத்தை (குறைந்தபட்சம் அல்லது அதிகபட்சம்) தீர்மானிக்க உங்களை அனுமதிக்கிறது: பரிசீலனையில் உள்ள முறைக்கு இணங்க, புறநிலை செயல்பாட்டின் உச்சநிலை (அதிகபட்சம் அல்லது குறைந்தபட்சம்) செயல்பாட்டின் வேகமான அதிகரிப்பு (குறைவு) திசையில் தீர்மானிக்கப்படுகிறது, அதாவது. செயல்பாட்டின் சாய்வு (ஆன்டி-கிரேடியன்ட்) திசையில். ஒரு புள்ளியில் சாய்வு செயல்பாடு இதில் i, j,..., n என்பது ஆய அச்சுகளுக்கு இணையான அலகு திசையன்கள். அடிப்படை புள்ளியில் சாய்வு செங்குத்தான இறங்கு முறை மேலும் வளர்ச்சிசாய்வு இறங்கும் முறை. பொதுவாக, ஒரு செயல்பாட்டின் உச்சநிலையைக் கண்டறியும் செயல்முறையானது ஒரு மறுசெயல் செயல்முறையாகும், இது பின்வருமாறு எழுதப்பட்டுள்ளது: ஒரு செயல்பாட்டின் அதிகபட்சத்தைக் கண்டறிய "+" குறியும், ஒரு செயல்பாட்டின் குறைந்தபட்சத்தைக் கண்டறிய "-" குறியும் பயன்படுத்தப்படும்; யூனிட் திசை திசையன், இது சூத்திரத்தால் தீர்மானிக்கப்படுகிறது: படி அளவை தீர்மானிக்கும் மாறிலி மற்றும் அனைத்து i-வது திசைகளுக்கும் ஒரே மாதிரியாக இருக்கும். இயக்கத்தின் திசையில் உள்ள புறநிலை செயல்பாடு f(x) இன் குறைந்தபட்ச நிலையில் இருந்து படி அளவு தேர்ந்தெடுக்கப்பட்டது, அதாவது சாய்வு அல்லது எதிர்கிரேடியன்ட்டின் திசையில் ஒரு பரிமாண தேர்வுமுறை சிக்கலைத் தீர்ப்பதன் விளைவாக: வேறு வார்த்தைகளில் கூறுவதானால், இந்த சமன்பாட்டைத் தீர்ப்பதன் மூலம் படி அளவு தீர்மானிக்கப்படுகிறது: இவ்வாறு, கணக்கீட்டு படி தேர்வு செய்யப்படுகிறது, செயல்பாடு மேம்படும் வரை இயக்கம் மேற்கொள்ளப்படுகிறது, இதனால் ஒரு கட்டத்தில் உச்சநிலை அடையும். இந்த கட்டத்தில், தேடல் திசை மீண்டும் தீர்மானிக்கப்படுகிறது (கிரேடியண்ட் பயன்படுத்தி) மற்றும் புறநிலை செயல்பாட்டின் புதிய உகந்த புள்ளி தேடப்படுகிறது, முதலியன. எனவே, இந்த முறையில், தேடல் பெரிய படிகளில் நிகழ்கிறது, மேலும் செயல்பாட்டின் சாய்வு சிறிய எண்ணிக்கையிலான புள்ளிகளில் கணக்கிடப்படுகிறது. இரண்டு மாறிகளின் செயல்பாட்டின் விஷயத்தில் இந்த முறைபின்வரும் வடிவியல் விளக்கம் உள்ளது: ஒரு புள்ளியிலிருந்து இயக்கத்தின் திசையானது புள்ளியில் உள்ள நிலைக் கோட்டைத் தொடும். வம்சாவளி பாதை ஜிக்ஜாக் ஆகும், அருகிலுள்ள ஜிக்ஜாக் இணைப்புகள் ஒன்றோடொன்று ஆர்த்தோகனல். அண்டை புள்ளிகளில் வம்சாவளி திசைகளின் திசையன்களின் ஆர்த்தோகனலிட்டிக்கான நிபந்தனை பின்வரும் வெளிப்பாட்டால் எழுதப்பட்டுள்ளது: செங்குத்தான வம்சாவளி முறையைப் பயன்படுத்தி உச்ச புள்ளிக்கு இயக்கத்தின் பாதை, f(x) செயல்பாட்டின் சம அளவிலான கோட்டின் வரைபடத்தில் காட்டப்பட்டுள்ளது ஒரு உகந்த தீர்விற்கான தேடலானது மீண்டும் கணக்கிடும் படியில் (பல அளவுகோல்கள்) முடிவடைகிறது: தற்போதைய தேடல் புள்ளியின் ஒரு சிறிய சுற்றுப்புறத்தில் தேடல் பாதை உள்ளது: புறநிலை செயல்பாட்டின் அதிகரிப்பு மாறாது: உள்ளூர் குறைந்தபட்ச புள்ளியில் புறநிலை செயல்பாட்டின் சாய்வு பூஜ்ஜியமாக மாறும்: ஒரு பள்ளத்தாக்கில் நகரும் போது சாய்வு வம்சாவளி முறை மிகவும் மெதுவாக மாறும் என்பதை கவனத்தில் கொள்ள வேண்டும், மேலும் புறநிலை செயல்பாட்டில் மாறிகளின் எண்ணிக்கை அதிகரிக்கும் போது, முறையின் இந்த நடத்தை பொதுவானதாகிறது. பள்ளத்தாக்கு ஒரு தாழ்வானது, இதன் நிலைக் கோடுகள் தோராயமாக நீள்வட்ட வடிவில் அரை அச்சுகளுடன் பல மடங்கு வேறுபடும். ஒரு பள்ளத்தாக்கின் முன்னிலையில், வம்சாவளி பாதை ஒரு சிறிய படியுடன் ஒரு ஜிக்ஜாக் கோட்டின் வடிவத்தை எடுக்கும், இதன் விளைவாக குறைந்தபட்சமாக இறங்கும் வேகம் வெகுவாகக் குறைக்கப்படுகிறது. இந்த செயல்பாடுகளின் ஆண்டிகிரேடியன்ட்டின் திசையானது திசையிலிருந்து குறைந்தபட்ச புள்ளிக்கு கணிசமாக விலகுகிறது என்பதன் மூலம் இது விளக்கப்படுகிறது, இது கணக்கீட்டில் கூடுதல் தாமதத்திற்கு வழிவகுக்கிறது. இதன் விளைவாக, அல்காரிதம் கணக்கீட்டு செயல்திறனை இழக்கிறது. கல்லி செயல்பாடு சாய்வு முறை, அதன் பல மாற்றங்களுடன், பரவலாக உள்ளது பயனுள்ள முறைஆய்வின் கீழ் உள்ள பொருட்களின் உகந்ததைத் தேடுகிறது. சாய்வு தேடலின் குறைபாடு (மேலே விவாதிக்கப்பட்ட முறைகள் போன்றவை) அதைப் பயன்படுத்தும் போது, செயல்பாட்டின் உள்ளூர் உச்சநிலையை மட்டுமே கண்டறிய முடியும். மற்றவர்களைக் கண்டுபிடிக்க உள்ளூர் உச்சநிலைகள்மற்ற தொடக்க புள்ளிகளிலிருந்து தேடுவது அவசியம். கூடுதலான வேகம் சாய்வு முறைகள்சாய்வு கணக்கீடுகளின் துல்லியத்தையும் கணிசமாக சார்ந்துள்ளது. பொதுவாக குறைந்தபட்ச புள்ளிகளுக்கு அருகாமையில் அல்லது கல்லி சூழ்நிலையில் ஏற்படும் துல்லியம் இழப்பு, பொதுவாக சாய்வு இறங்கு செயல்முறையின் ஒருங்கிணைப்பை சீர்குலைக்கும். கணக்கீட்டு முறை படி 1:ஒரு செயல்பாட்டின் சாய்வைக் கணக்கிடுவதற்கான பகுப்பாய்வு வெளிப்பாடுகளின் (குறியீட்டு வடிவத்தில்) வரையறை படி 2: ஆரம்ப தோராயத்தை அமைக்கவும் படி 3:கடைசி தேடல் திசையை மீட்டமைக்க அல்காரிதம் செயல்முறையை மறுதொடக்கம் செய்ய வேண்டிய அவசியம் தீர்மானிக்கப்படுகிறது. மறுதொடக்கத்தின் விளைவாக, தேடல் மீண்டும் வேகமாக இறங்கும் திசையில் மேற்கொள்ளப்படுகிறது.
 .
.
f(x[கே]-a k f'(x[கே]))
= f(x[k] – af"(x[கே]))
.
ஜே (அ) = f(x[கே]-af"(x[கே]))
.




![]() ,
,![]()
 .
.
![]() உண்மையான டொமைனில் செயல்பாட்டு வாதத்தின் (கட்டுப்படுத்தப்பட்ட அளவுருக்கள்) மதிப்புகள்.
உண்மையான டொமைனில் செயல்பாட்டு வாதத்தின் (கட்டுப்படுத்தப்பட்ட அளவுருக்கள்) மதிப்புகள்.![]() ஒரு திசையன் ஆகும், அதன் ஆய அச்சுகள் மீதான கணிப்புகள் ஆயங்களைப் பொறுத்து செயல்பாட்டின் பகுதி வழித்தோன்றல்கள் ஆகும்:
ஒரு திசையன் ஆகும், அதன் ஆய அச்சுகள் மீதான கணிப்புகள் ஆயங்களைப் பொறுத்து செயல்பாட்டின் பகுதி வழித்தோன்றல்கள் ஆகும்:![]() மேற்பரப்புக்கு கண்டிப்பாக ஆர்த்தோகனல் ஆகும், மேலும் அதன் திசையானது செயல்பாட்டின் வேகமான அதிகரிப்பின் திசையைக் காட்டுகிறது, மேலும் எதிர் திசை (ஆன்டிகிரேடியன்ட்) முறையே, செயல்பாட்டின் வேகமான குறைவின் திசையைக் காட்டுகிறது.
மேற்பரப்புக்கு கண்டிப்பாக ஆர்த்தோகனல் ஆகும், மேலும் அதன் திசையானது செயல்பாட்டின் வேகமான அதிகரிப்பின் திசையைக் காட்டுகிறது, மேலும் எதிர் திசை (ஆன்டிகிரேடியன்ட்) முறையே, செயல்பாட்டின் வேகமான குறைவின் திசையைக் காட்டுகிறது.

![]() - சாய்வு தொகுதியானது சாய்வு அல்லது எதிர்ப்பு சாய்வு திசையில் செயல்பாட்டின் அதிகரிப்பு அல்லது குறைப்பு விகிதத்தை தீர்மானிக்கிறது:
- சாய்வு தொகுதியானது சாய்வு அல்லது எதிர்ப்பு சாய்வு திசையில் செயல்பாட்டின் அதிகரிப்பு அல்லது குறைப்பு விகிதத்தை தீர்மானிக்கிறது:
![]()
![]()

![]()









